nyaru
1
Simple Stepper Motor Analyzer
制御基板 - アナライザー - モーターで接続すると電流値や信号波形を見ることができる。
ステッピングモーターの動作確認に使える。
Duetのフォーラムで上がっていたもの。(欲しい人いたら少数配布するよ的なやつ)
https://forum.duet3d.com/topic/23461/anybody-wants-a-stepper-motor-analyzer
ソースコード・回路
動画での紹介
ライセンスはハードウェア・ソフトウェア共にCC0 1.0 Universal
製品化の予定はないらしく他の人に期待!みたいな感じ。
nyaru
2
モーターの動作を確認してみたかったので実際に作ってみました。
電流値を見るだけなら電流センサーをオシロスコープにつないだ方が手っ取り早いのですが、今回の組み立ては個人的な興味と検査デバイスとしてどれくらい使えそうなのかの確認です。
以下記録です。
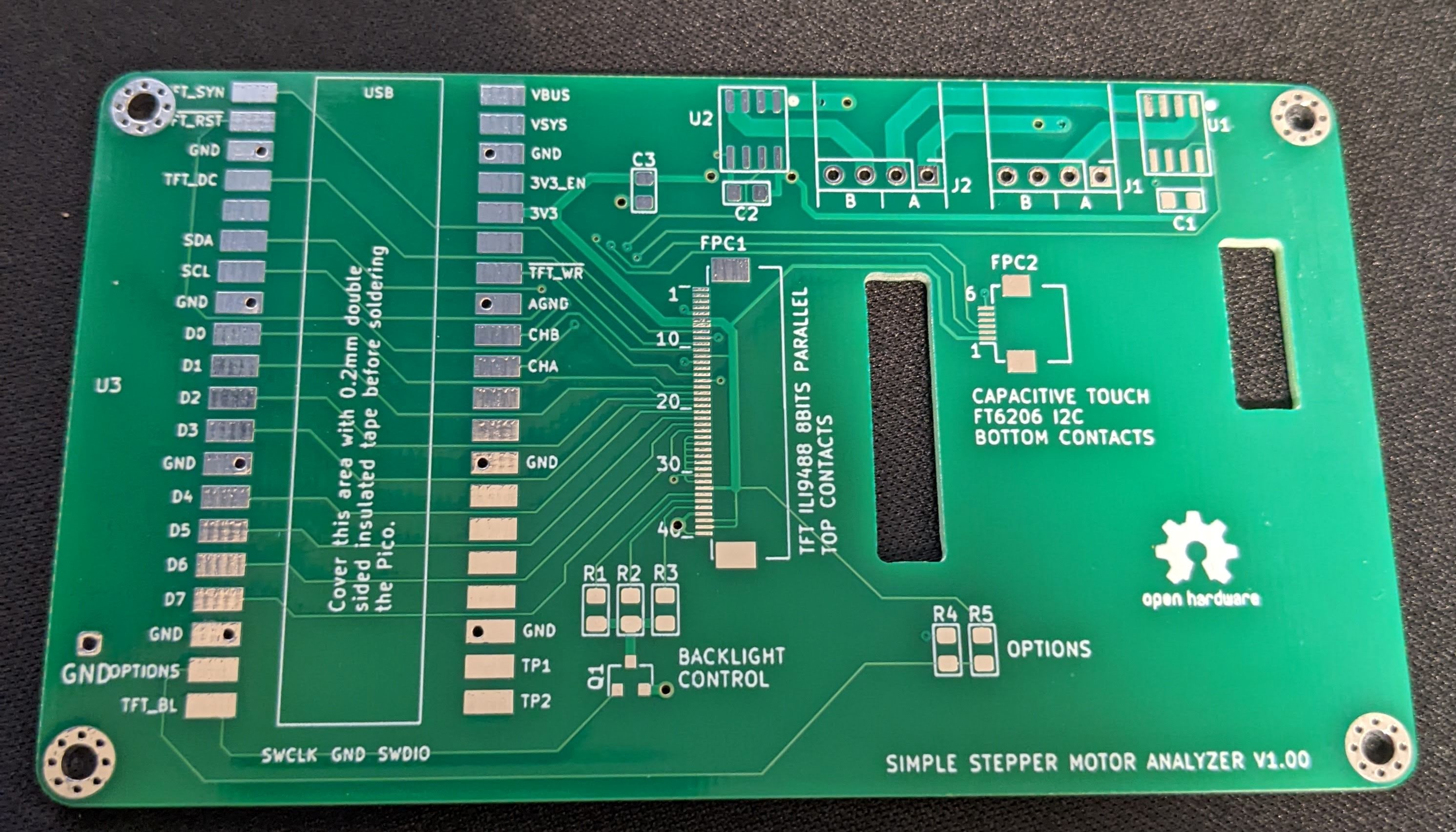
少し基板サイズを調整し基板を発注。(基板サイズが100mm以内だと安くなるので、調整)
BOMの部品を注文。(一部の部品は変更。)
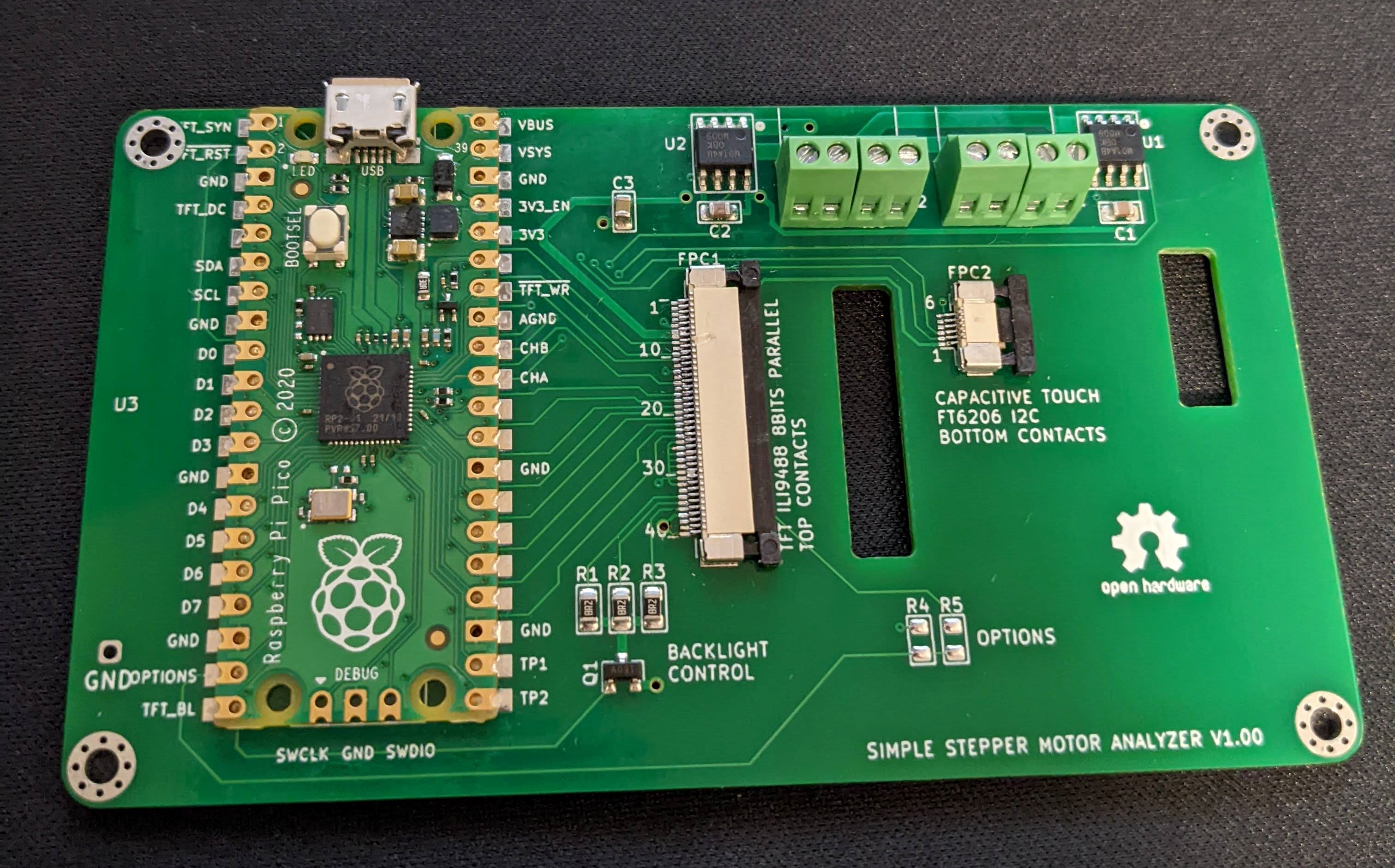
部品と基板が揃ったらホットプレートリフロー。
半田ブリッジの修正が一番大変でした。共通で接続されているピンの半田ブリッジが残っていますが問題ないので諦めました。
動作の様子
ジョグ移動のみ
NCプログラム動かしているとき
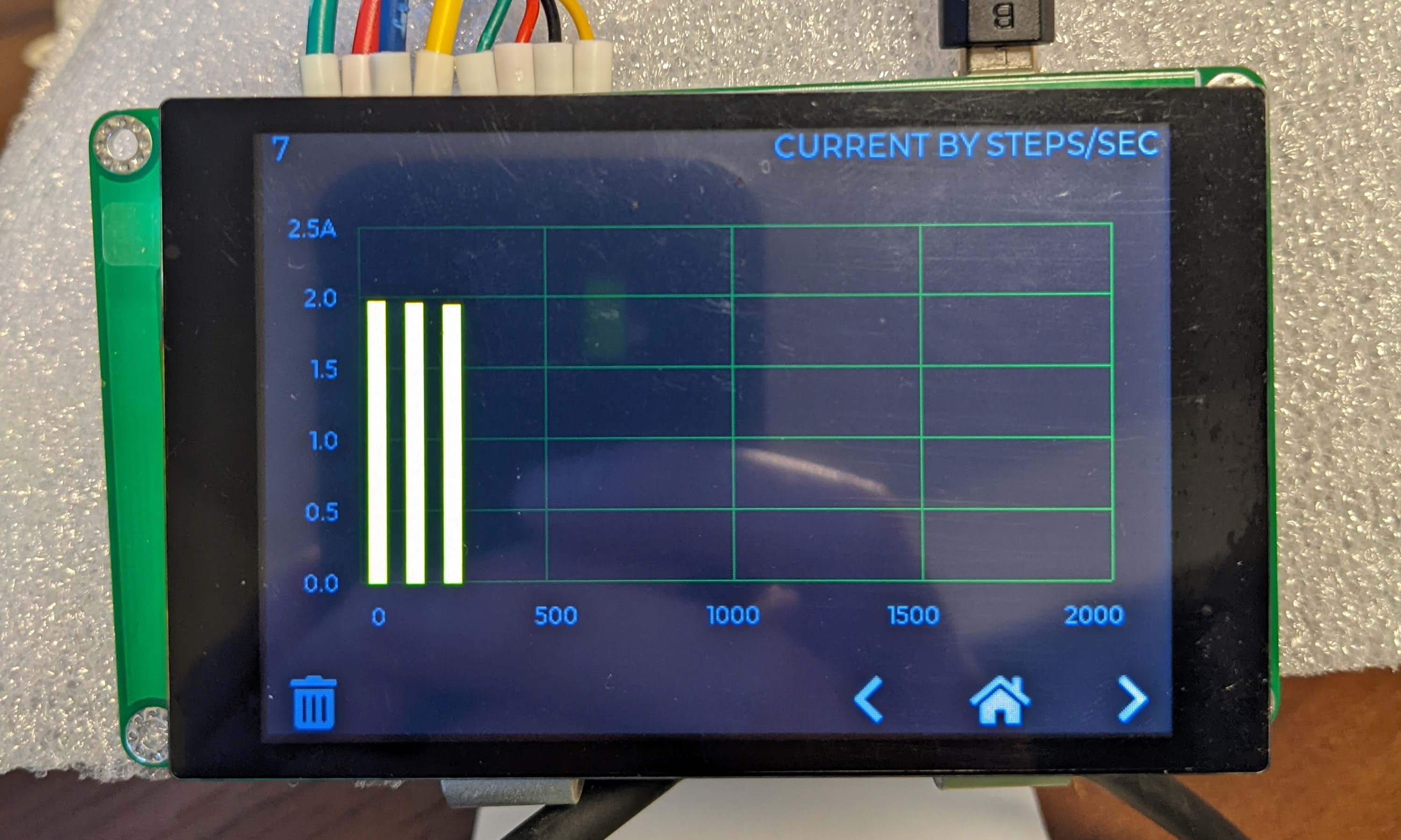
モーター電流を2000mAに設定したときの電流量です。概ね正しく計測できているかと思います。
A相B相で位相がズレていることもわかります。
変更した部品
-
電流センサー
ACS70331 → TMCS1101A4B
ACS70331が入手困難なので変更しました。ピン配置が同じです。Duetのフォーラムでも動作確認が取れているようなので使ってみました。半導体不足のせいで高いし在庫が少ないです。
データシート上は3.3Vでの電流計測範囲が記載されていないですが動作はしています。ただし計測範囲は狭くなっているはず。
また周波数はACS70331は1MHzなのに対して、TMCS1101は80kHzで性能は落ちますが、ステッピングモーターのパルス計測は1MHzも必要はなく80kHzで十分かも・・・。
(最大移動速度F3000と仮定すると、200 step/mm * 3000 mm/min * 1/60 min/s = 10,000 step/s となり、1/8マイクロステップだと8ステップでA相B相の各コイルの電流が入れ替わることから、80kHzあると標本化定理の周波数の2倍以上でサンプリングできるので問題ないはず・・・)
-
コネクタ
KF2510 → WJEK254
注文し忘れたので秋月の2.54mmターミナルブロックを使用しました。
気づいたこと
TMCS1101A3Bも買ったので載せれば±7.25Aまで計測可能ですが、そこまで電流を使うことがあるのかどうか(コネクタや配線幅の修正が必要そうです)
CNCユーザーだとあまりステッピングモーターのパルスや電流のことはモーターが壊れでもしない限り気にしないので役立つ場面は少なそうですが、ロボットとかやってる人だったらまだ使える場面はありそうかなぁと思いました。
もちろんちゃんとした測定器にはかなわないですが・・・。
追記
私のboothにてステッピングモーターアナライザーの自作キットを扱うことにしました。
電流センサーはCC6920BSO-5Aに変更しており、性能はオリジナルのものからは下がります。
ただし波形の概略を知る程度であれば十分かとは思います。
興味があればどうぞ
morih
3
BOOTHから思ったより早く届いたので作って見ました。
といっても液晶が動いた程度しか確認していませんが。
ファームの書き込みの所ですが、Firmware_5A_RMS.uf2 というファイル名のままでは
boot modeのファイルシステムでアップデートできませんでした。
多分 FATの制限で、もしかしたらMAC OSでしか発生しない問題かもしれません。
ファイル名を短くF.UF2等にするとファームの更新が出来ました。
Windowsでは問題無いかも知れませんが、組み立て説明の所に記載した方が良いと感じました。
それと、
Home · nyarurato/simple_stepper_motor_analyzer-5A Wiki · GitHub のページにある
「組み立て説明」が横のナビゲーションの所からしか行けないので最初はこのページだけなのかと
勘違いしました。
可能ならナビゲーションとは別に, 組み立て説明, 使い方, FAQのリンクを書くか、
横のナビゲーションの所から見るように書いて貰えるとわかりやすいと思いました。
nyaru
4
ご意見ありがとうございます。
ファームウェアの書き込み時の注意点と組み立てのリンクについてドキュメントに記載しておきます!