こんにちは。
トリガーに関しては説明が全然足りていなくてすみません。該当トピックには順次説明を追加していきます。
- 押しボタンを押すとモーションが始まる
- モーションの最初にホーミングを追加する
の2つに分けて説明します。
押しボタンを押すとモーションが始まるようにする
これは説明文中にある外部トリガーというものになります。
この外部トリガーはDuet基板のconfigにこの端子を使うよと定義する必要があります。
それらの例が以下です。
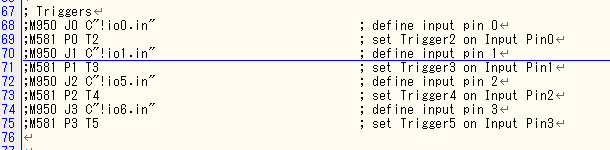
- ピン定義 M950 J0 C”io1.in” → io1のinピンを入力0(J0)として使います
- トリガー定義 M581 P0 T2 → 入力0(P0)にトリガー2番(T2)を割り振ります
テンプレートのconfigには;でコメントアウトされています。
IO0、IO1、IO5、IO6にそれぞれトリガー番号2,3,4,5を振るというものです。
IO0や1はリミットスイッチで埋まっていると思うのでIO5,6とかが空いているようであれば、該当2行の行頭の;を消せば有効化されます。
トリガーが有効化され、トリガー用の入力ピンに繋がるスイッチが押されるとconfigが置いてあるフォルダのtrigger〇.gというファイルが実行されるようになります。
メカキネソフトでこのtrigger〇.gとして保存するにはモーションデータ送信時の送信先をTrigger◯ Motionと指定すれば良いです。
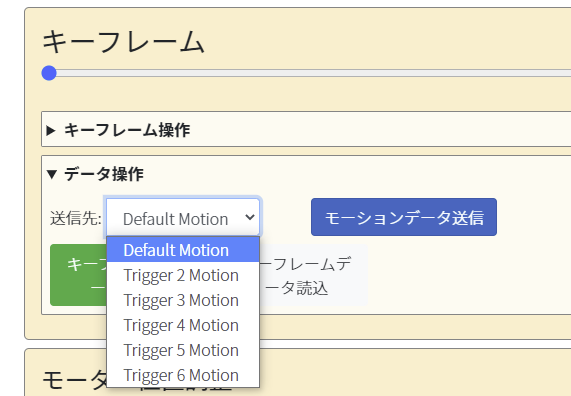
そうすると、前述のconfigで定義したピンに繋がっているスイッチが押されたときに作成したモーションが再生されるようになります。
モーションの最初にホーミングを追加する
これは今のメカキネソフトではアクションとして追加できるようにしていなかったので、現時点ではメカキネソフト単体ではできません。
なので前述のtrigger◯.gを少しだけ編集する必要があります。
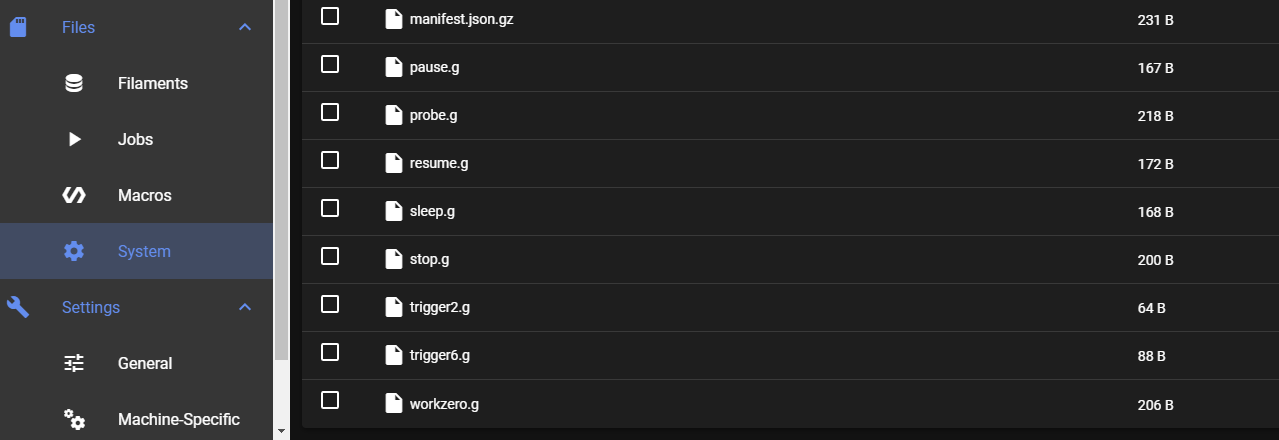
前述の方法でモーションを送っている場合、WEBUIあるいはSDカード内を見るとconfig.gとかがいるsystemのところにtrigger◯.gがいます
このファイルを開いて一番先頭にホーミング用のコマンドを追加します。
ホーミング用のコマンドの例は以下の通りでG28単品で使うか、G28にXYZなどの軸名をつけて使います。
例1 G28 ;homeall.gを実行
例2 G28 XZ ;XZのモーターをホーミング(homex.gとhomez.gを実行)
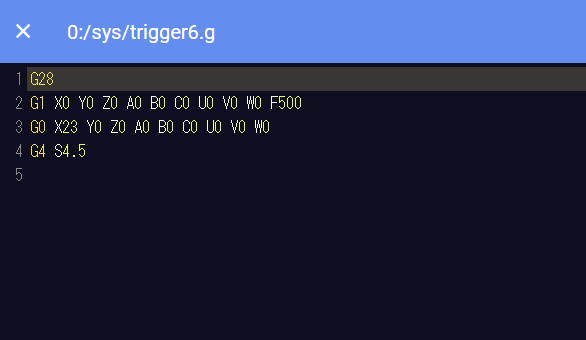
G28のコマンドの記入が終わり保存すれば、トリガーされたときにまずホーミングからスタートされるようになります。