Gymさま nyaruさま
ご回答ありがとうございます。
これについては、今、制作に使わせてもらっているスタジオから
もしそれでもずれる場合は、モーターの交換も検討しようと思っています。
config.gのモーターの電流の値を3000に上げてみました。
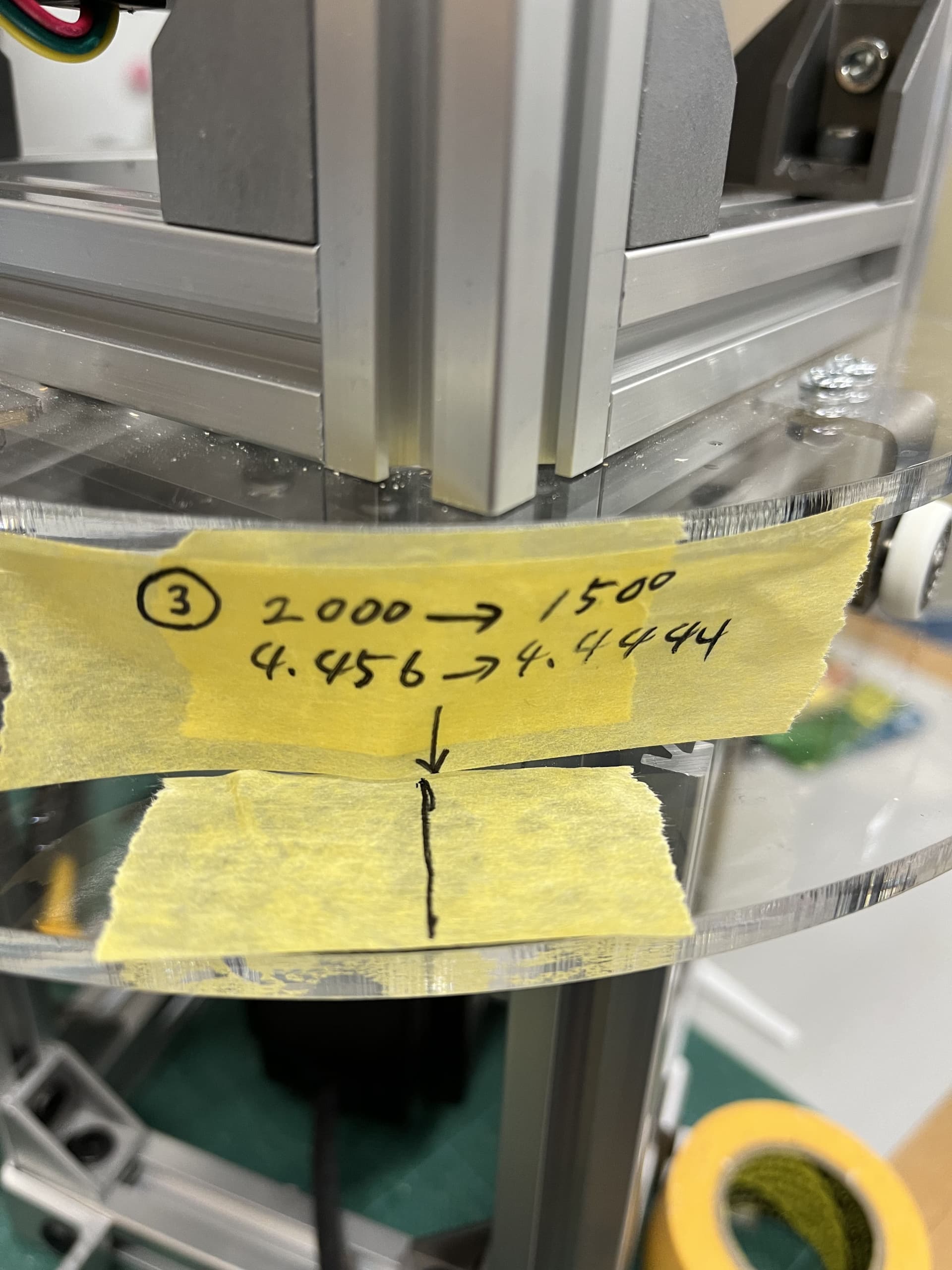
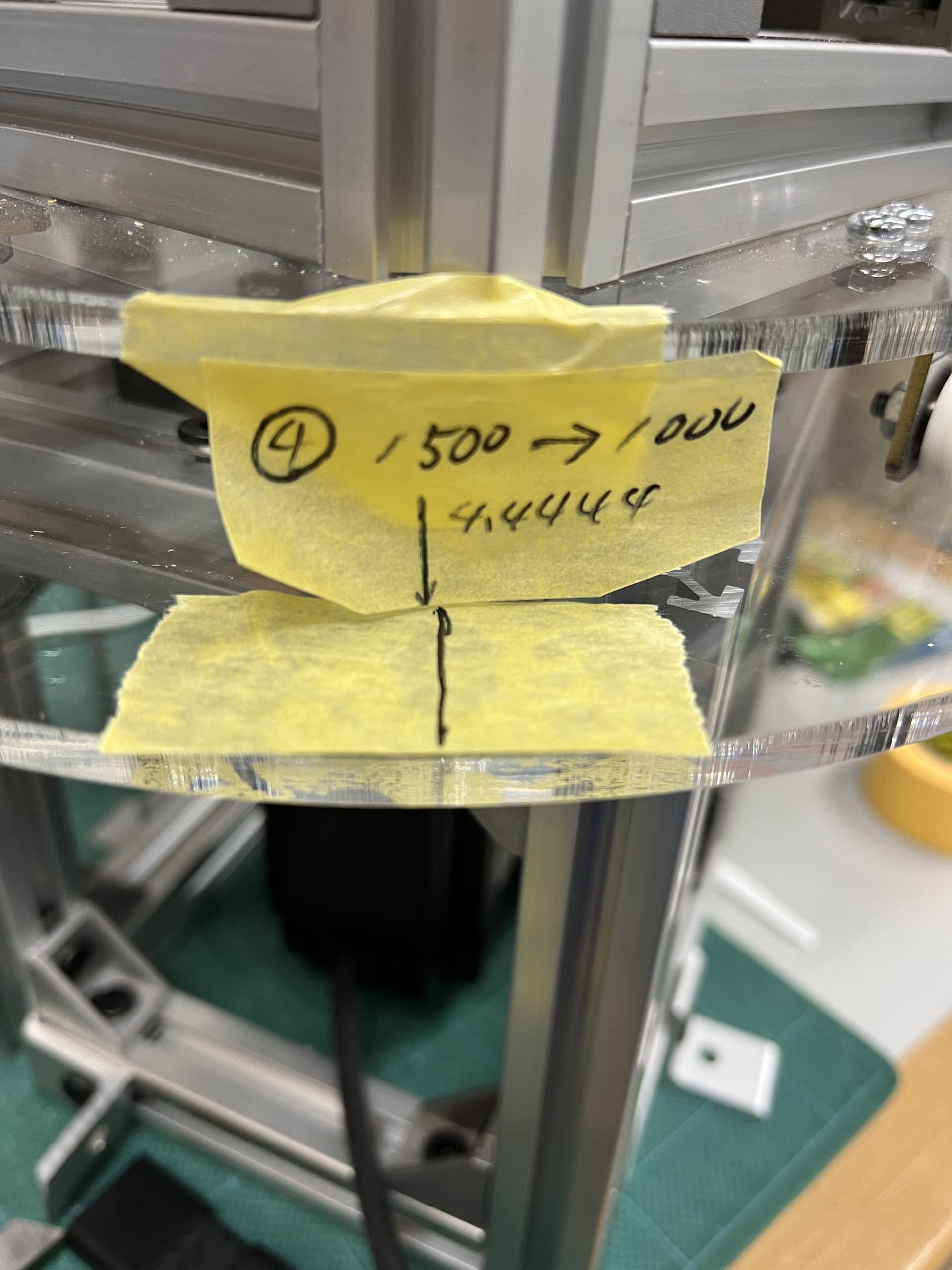
上の矢印が下の矢印より手前で止まっているので、3600°より若干、回転角度が足りないようです。
モーターの交換、機構の改善等、
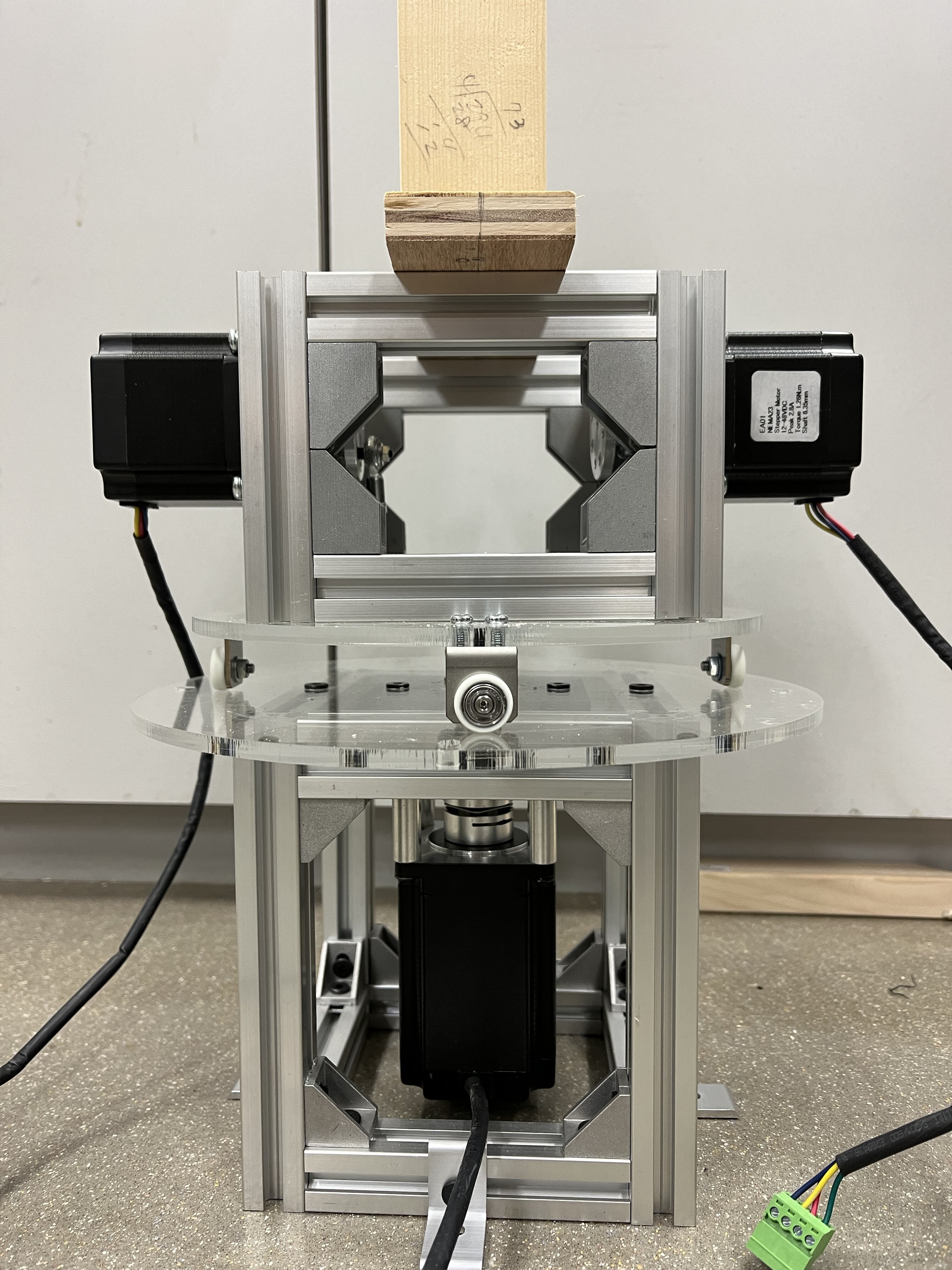
回転台
ステッピングモーターを交換するとした場合、どれにするか調べています。
Gym
2023 年 8 月 15 日午前 4:35
44
バッと見た感じ、
ちなみに私ならモーターや機構を変えるよりも設定で調整してしまいます。
「いいね!」 1
nyaru
2023 年 8 月 15 日午前 6:58
45
モーターの軸と回転のテーブルを直結しているようなので、理論値で動作するんじゃないかなと思っていましたが、原因はぱっとはわかりませんが誤差があるのかもしれないですね。
もし加速減速で脱調しているのであれば加速度の設定値を落とすと改善するかもしれません。(回転のスピードの立ち上がり立ち下がりに影響は出ますが・・・)M201 X2000.00 Y2000.00 Z2000.00 ;最大加速度設定
あとはGymさんが言うようにstep/mmを少し増やしてみても良いと思います
10度ぐらい足りていなさそうなので、4.456とかにして一度様子をみたら良いかと思います。(3600 * 4.444/3590=4.456で計算)M92 X4.456 Y4.456 Z4.456 ;step/mm設定
「いいね!」 1
Gymさま nyaruさま
ご回答ありがとうございます。
色々と設定の数値を変えて微調整を繰り返しています。
ただこの調整方法だと目視で360.00ぴったり回転する数値を
nyaru
2023 年 8 月 15 日午後 1:50
48
加速度によって変わるということは、加速や減速のときに動き切れなかったり、行き過ぎたりが起きているってことなんですかね。
モーターをピッタリ指定角度に動かす事自体はエンコーダーがあれば可能ではあるのですが(Duetにつなぐ場合はいろいろ制限がありますが )、ただどうやってエンコーダーを回転台に取り付けるのかとか設定がさらに複雑になるなど新たな問題が出てきます。
ふと以下のことを思いました。
1方向に何度も回転させたときの誤差が大きくても左回転右回転と両方向から回転させたときの誤差が小さければ、両方向から動かして複数回転させないモーションにしたら誤差は比較的少なく済むのではないかということ(バックラッシュ等あるのでどうなるかわからないですが)
回転台の1周でリミットスイッチや近接スイッチ等のスイッチが入るようにしておけば、モーションの開始前等にホーミングをいれることで強制的に毎回同じ開始位置に持っていけるのではないかということ
参考になれば
「いいね!」 1
nyaruさま Gymさま
お返事ありがとうございます。
確認はしていたつもりですが、イモネジの締め付けが足りなかったのが1番の原因だったようです。お手数をおかけしてすみませんでした。
「いいね!」 1
A 360°回転を10回繰り返す→角度OK
なぜかDとFのときは必ず角度がずれます。
configの設定等、もし何か調整できる方法があれば、教えていただけないでしょうか?
追記
nyaru
2023 年 8 月 16 日午前 6:48
51
うーん、難しいですね。
すでに確認済みかもしれないですが、回転台の軸を手で回してみて引っかかり等ないか確認してみても良いかと思います。
おそらく脱調が起きていて、全体的な位置がズレてしまっているのかと思います。部分的にトルクが負けている箇所があるのかと。
もしかしたら加速度、速度を遅くしたら改善するかもしれないです。
「いいね!」 1
ありがとうございます。
加速度を2000から1500まで下げたところ36°と48°の脱調が解消されました。
「いいね!」 1
ストップウォッチで測ったところ
理想は60°で0.4秒だったのですが、
もし、どうしてももっと速くする必要が
「いいね!」 1
もうひとつのモーターが
ただ、現状よりconfig.gで数値を上げても
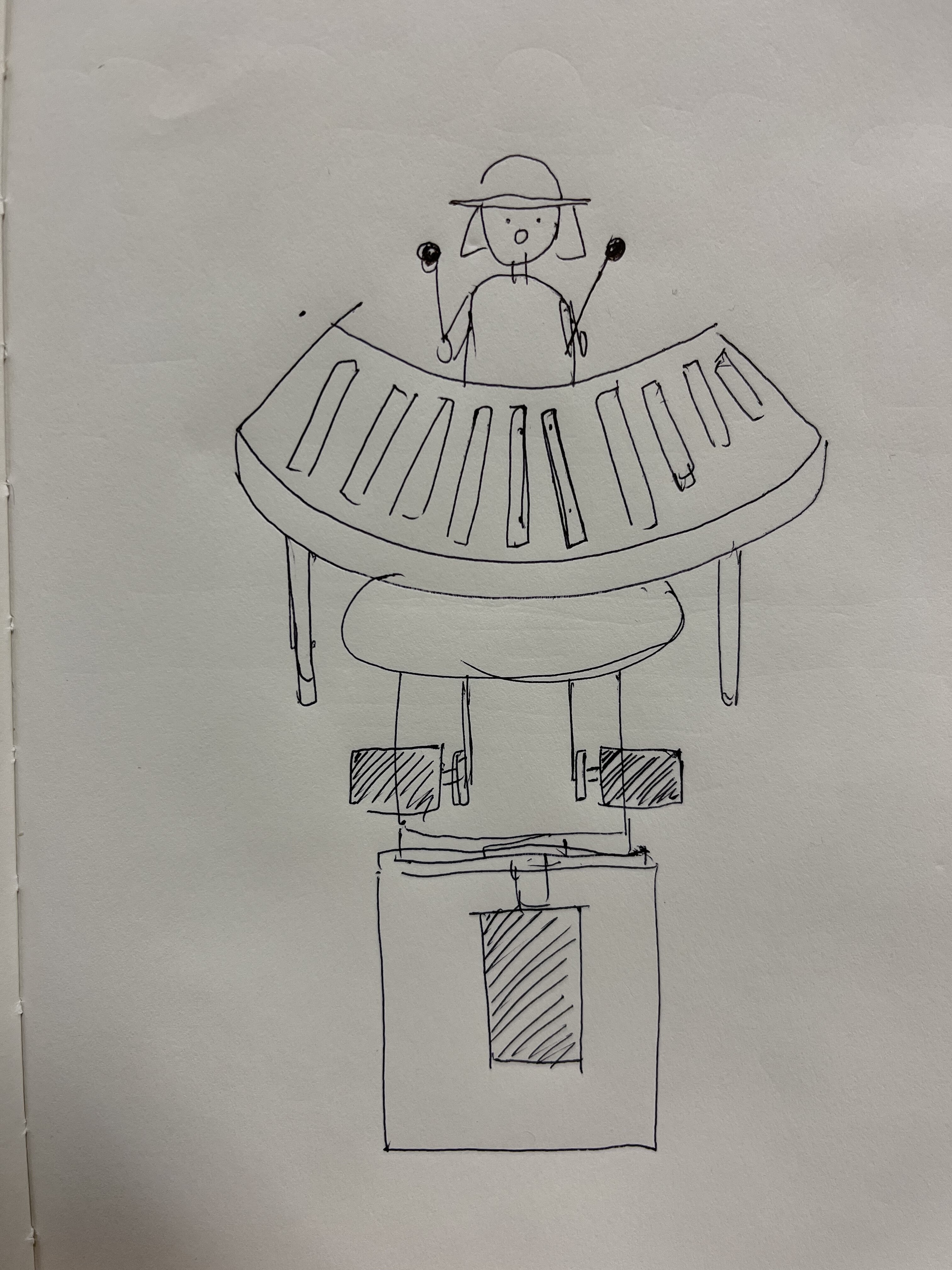
鍵盤の数を減らす、
これでこれまで最大の移動角度が60°だったのが
追加モーターの分、重量が増えるので
「いいね!」 1
いくつか質問があります。
それができたとして、お客さんの中には演奏の途中でスタートボタンを押したり、
もし自動演奏装置に何かしら不具合が起きた時には緊急停止ボタンを押したら
原点復帰ボタンを作り、そのボタンを押すと、両腕につながるモーターと
トリガーを使用する場合は以下のように設定する必要があります。
ピン定義 M950 J◯ C”io◯.in”
トリガー定義 M581 P◯ T◯
なお、Tパラメータは2以上にしてください(T0,T1は非常停止系で既に定義されています)
Duet Mainboard 6HCを子基板として使用する場合は子基板configに以下の設定値が必要です。
1.3 外部トリガーの配線
スイッチにピン定義で設定した入力ピンとGNDをつなぎます。
スイッチのタイプがNOかNCによって上のピン定義が変わります。
nyaru
2023 年 8 月 19 日午後 3:39
59
これは可能です。M581 というコマンドで外部トリガーを設定します。
これもデフォルトでそうなっていたはずです。ボタンを押してNCプログラムを実行している際中は、ボタンを押しても最初からということはなかったと思います。
これも可能です。
これも可能です。
「いいね!」 1
ご回答ありがとうございます。
【メモ】https://bbs.avalontech.jp/t/duet3/604/4