Gym
1
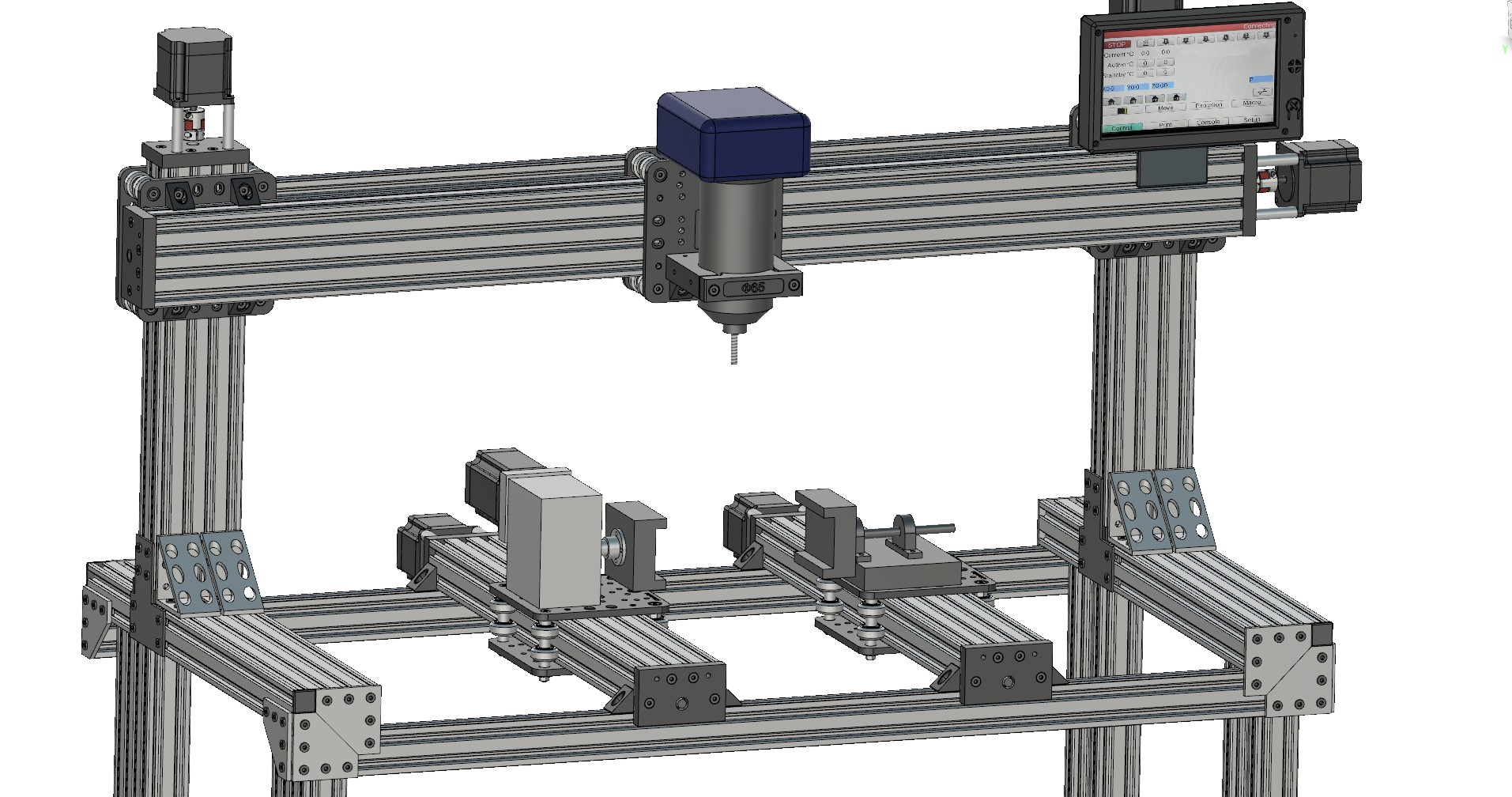
しばらく更新していませんでしたが、久しぶりにC-BeamMachine剛をパワーアップさせようと色々部品を買いあさっています。
まずは4軸化を試し、想定通りに動くようなら5軸化までやってみようかと思っています。
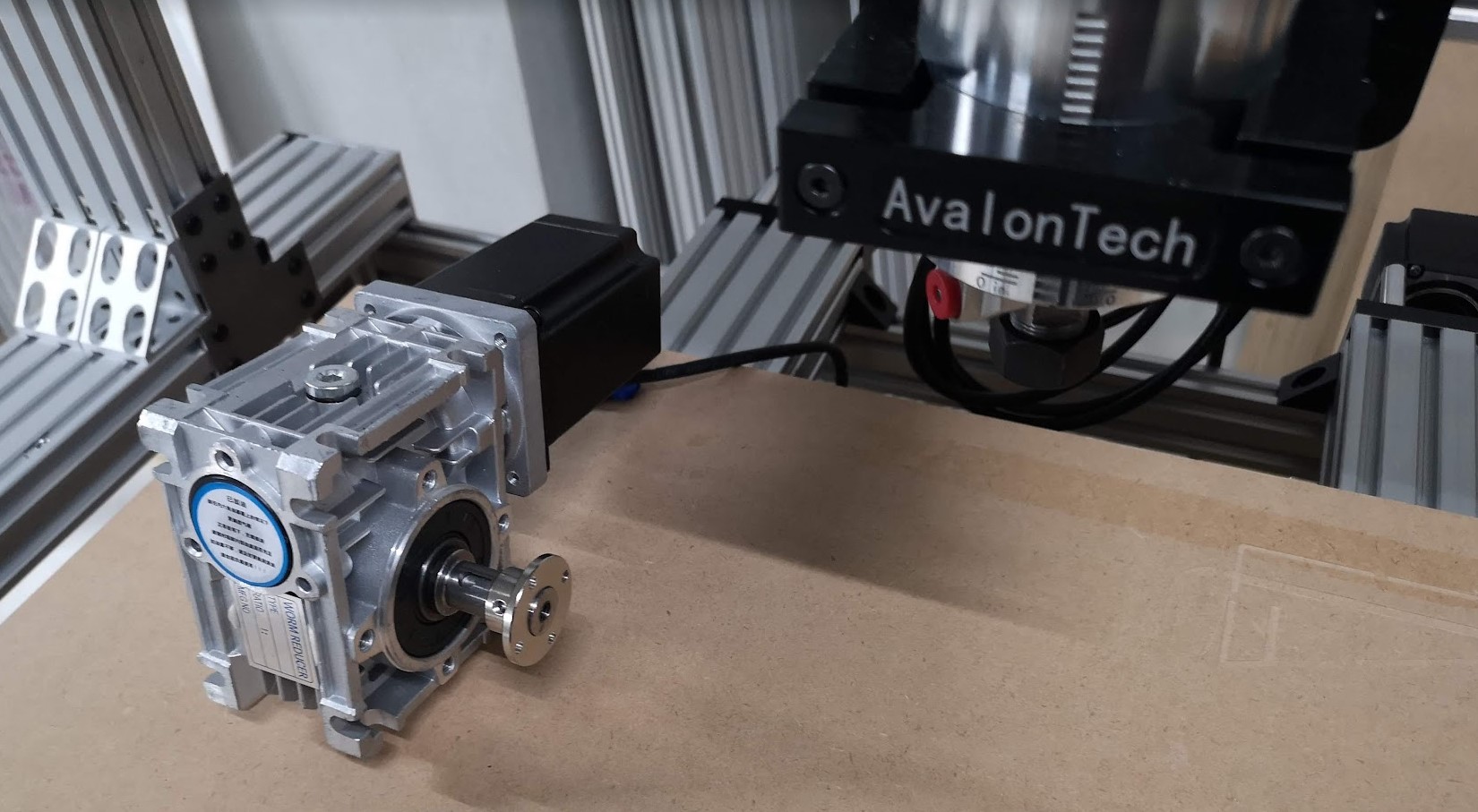
Nema23ハイトルクモーターのトルクでテーブルを保持するのは不安なので減速機を入れています。
(既存の4軸マシンもボックスに入っているのでおそらく減速している?)
3軸まではV-slotのモジュール化された部品で作れましたが、4軸向け部品はなさそうなので規格の違う部品を集めてスペーサーやブラケットを自作して…と少々手間はかかりそうです。
現在の課題や要確認事項は
- ステッピングモーター7個使うけど制御できるか確認(多分Duet3 mini5+でいける)
- 4軸(5軸のテーブル)の保持トルクが足りるか
- CAMをどうするか(Fusion360のラップ機能なら無償版でも4軸パスが出せる?)
減速機は探せば1:50などがあるのでトルクを上げることはできるのですが、ポケットマネーで作っているので買いなおしたくないのが正直なところ…今回は1:10の小さいものを買いましたが安物買いの銭失いにならないことを祈りながら組んでみます
「いいね!」 2
Gym
2
動きました。
https://twitter.com/Gymnopedian/status/1729422232114589993
懸念していた部分に関しては
- ステッピングモーター7個使うけど制御できるか
→Duet3のエクスパンションボードで解決しました。
特殊な設定も必要なく、刺してA軸を指定したら動作しました。
新しく出てきた課題は
- 材料をどう掴むか、減速機をどう固定するか
- A軸のホーミングデータはどう記述するか
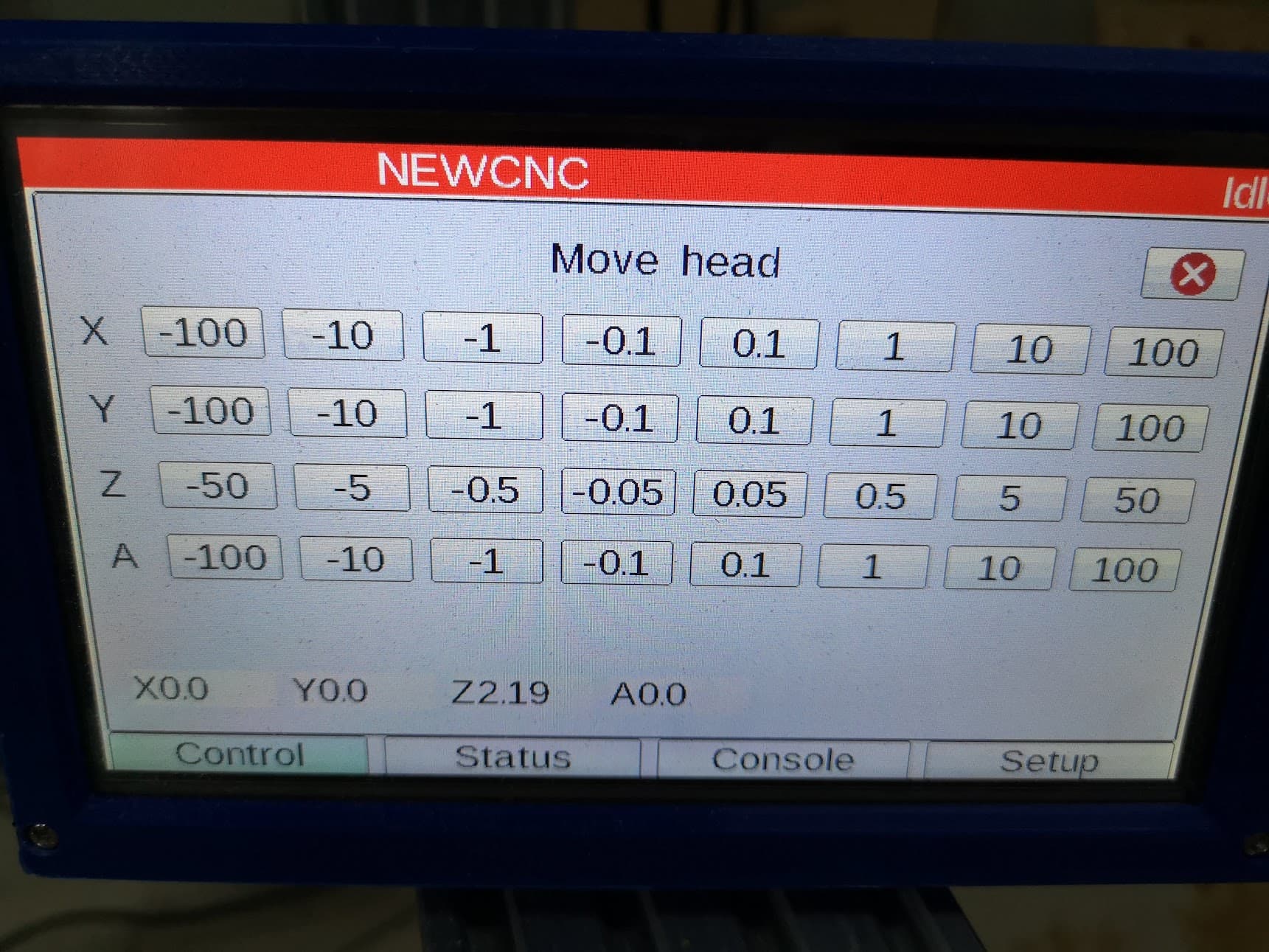
- タッチパネルの表示がおかしい
個別にみていくと
・材料の固定、減速機の固定
→旋盤用のチャックを使うのが正道だと思いますが、ガッツリ四軸専用機はすでに作っている人がいるのでこっちは卓上の簡易4軸モジュールみたいな形にしたいと思っています。
なので軽い代用品を用意できないかもう少し検討予定
現在のワンバイフォー材に穴を開けて固定しているのはさすがに雑が過ぎるので、テーブルへの固定はスペーサーを作ることになりそうです。
・A軸のホーミングデータはどう記述するか
→現在ホーミングするとA軸は動かず記述がないよとエラーがでます。動かすことはできますが、A軸の位置決めをするためにも将来的には必要そうです。
先行事例のkawadeさんはリミットスイッチでうまくホーミングしていたようなのでこれも方法を考える必要があります。
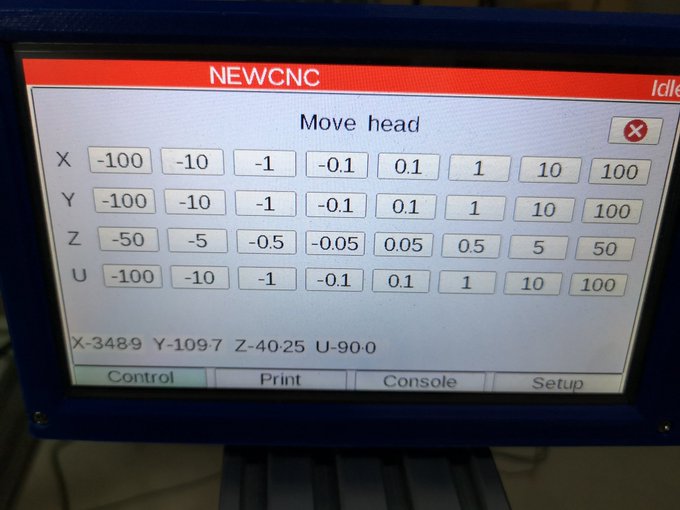
・タッチパネルの表示がおかしい
→config.gにA軸の設定を追記したところ、PanelDueにはなぜかU軸が追加されました。
押してもA軸は反応しません。
当方ファームウェアまでは深く潜って問題解決まではできないのでファームウェアの問題なら放置するしかないかもしれません。
nyaru
3
こんにちは。
これは、homea.gをSDカードのsysフォルダに入れたら改善するかもしれません。
とくに動かす内容なければ空っぽのファイルを入れておけば取り合えずよいかと思います。
もし動かす内容があるようならhomeall.gにも追記を忘れないように・・・
PanelDueのファームウェアでv3.2.0で設定された軸で表示するようにバグフィックスが入ってます。
もしかしたらファームウェアが古いのかもしれません。
PanelDueのファームウェアはファームウェアのファイルがSDカード内にあればM997 S4で更新できます。
「いいね!」 1
Gym
4
homea.gのデータは空でもいいんですね。
A軸の位置合わせは難しそうなので空のファイルでごまかせるのなら丁度よかったです。
panelのファームウェアも情報ありがとうございます!
タッチパネルの方のアップデートはやったことがないので手順まで教えていただけて助かります。
アップデート試してみます
「いいね!」 1
Gym
5
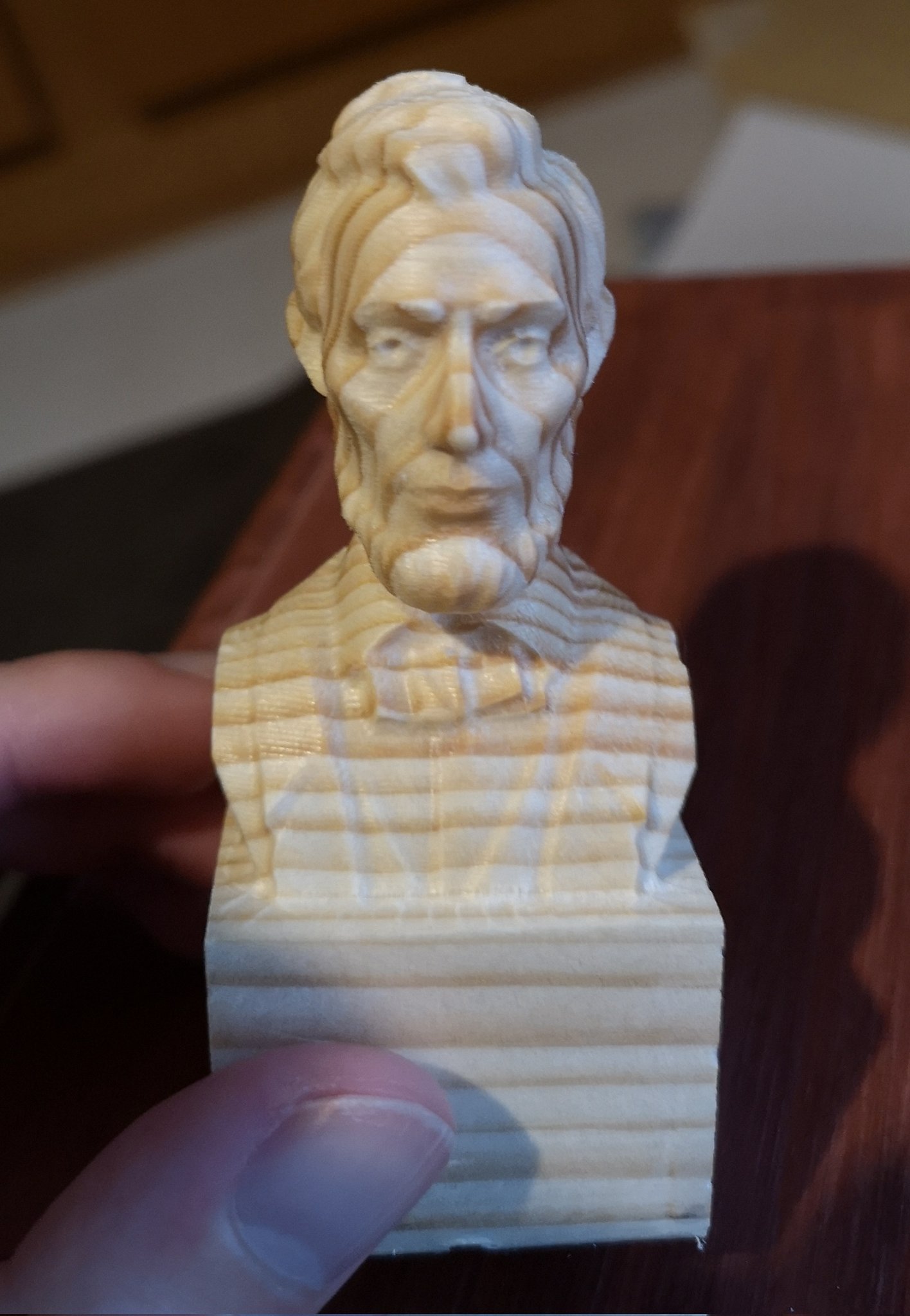
とりあえず削れました。
この考え方で4軸加工ができるのは確認できました。
減速機のΦ14シャフトにΦ14のフランジを付けているのですが、
ここの固定が円柱に対してイモネジとサイズの合っていないキー溝に対してのイモネジの二か所なのでだいぶ不安があります。
最安組み合わせはさすがに最適解ではありませんでした。
タッチパネルはファームウェアアップデートで直りました!
SDカードにファームウェアをアップロードしてアップデートの実行はできましたが、タッチパネル側のファームウェアが古かったのでタッチパネル正面のERASEも押す必要がありました。
ERASEを押した後画面がフリーズして操作不能になり、再起動しても画面が付かなくて終わったと思いましたが、その状態でアップデートを実行したら無事かきこまれました。
ドキュメントのニュアンスとちょっと違う気がしますが今のところ無事に動いています。
「いいね!」 1
HRMK
6
こんばんは
nyaruさんが先に書かれている通り,とりあえずであれば空のhomea.gを用意することで動くようになります.(MaRkoのB軸も現状同様の設定です)
また,今後A軸でも精度が出るホーミング(正確にはホーミング後のキャリブレーション?)を行えるようにする場合はM673を使うことをお勧めします.
最低2点プローブができる何かしらの平面(マシンのテーブル等)が必要となりますが,補正量の計算はDuet内で自動で計算してくれますので比較的簡単です.また,プローブができるようにある程度平面の向きを定めてやる必要がありますが,精度は必要ありませんので
1.手動で調整する
2.大まかな位置検出用のリミットスイッチを設ける
等々何とかはなるかと思います.
今現在私が使っている5軸CNCのホーミング&キャリブレーションはこんな感じです.
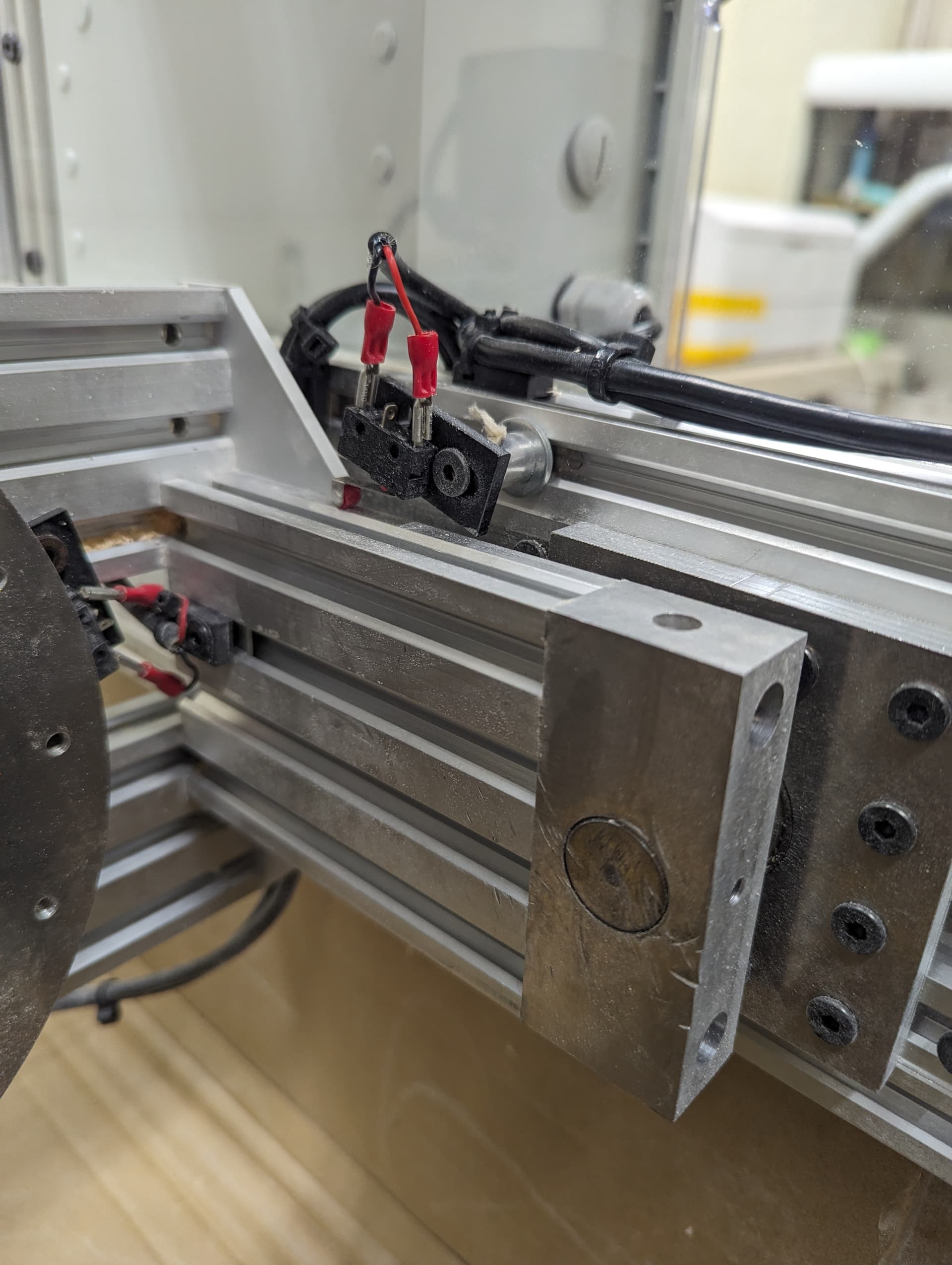
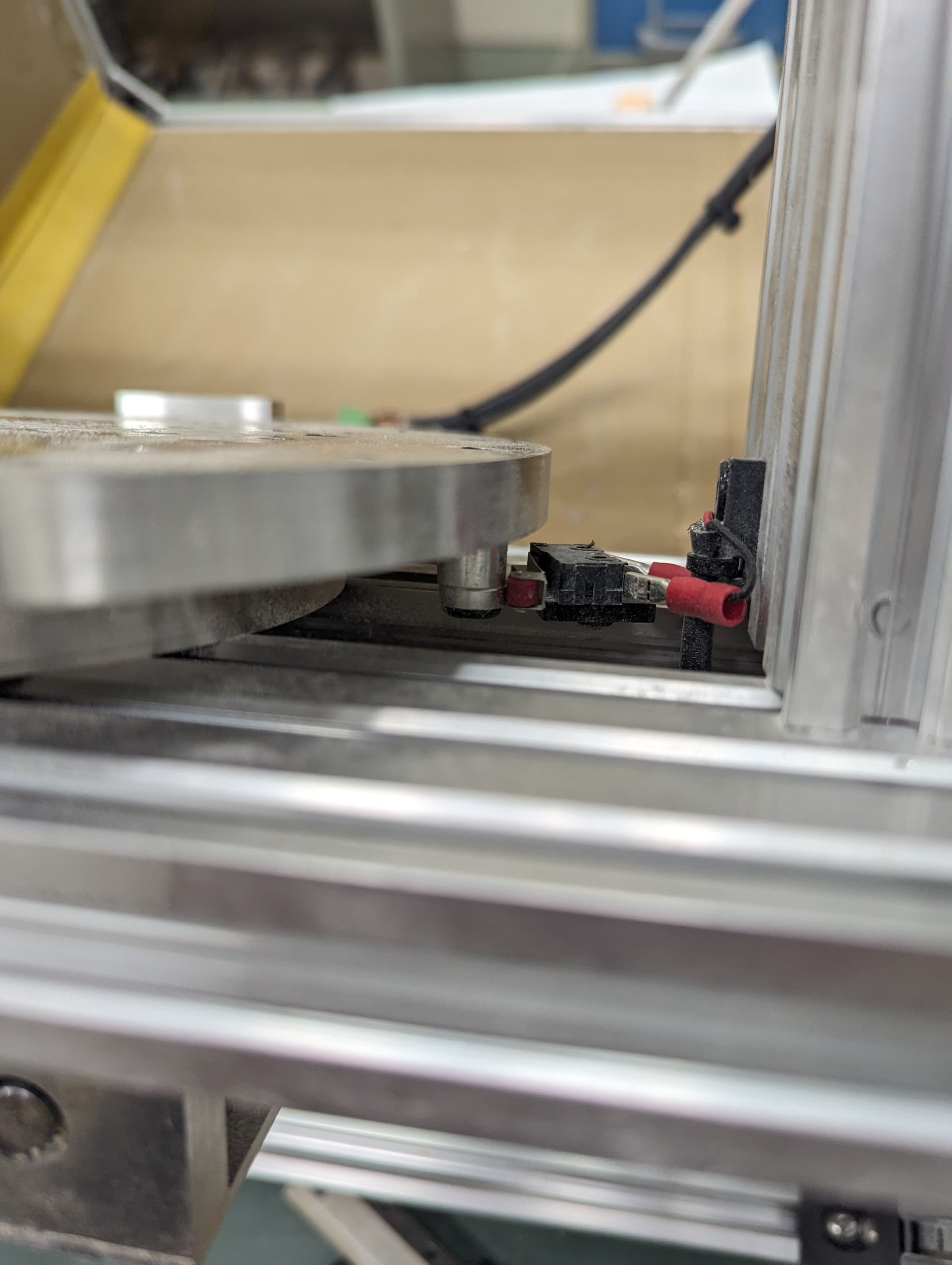
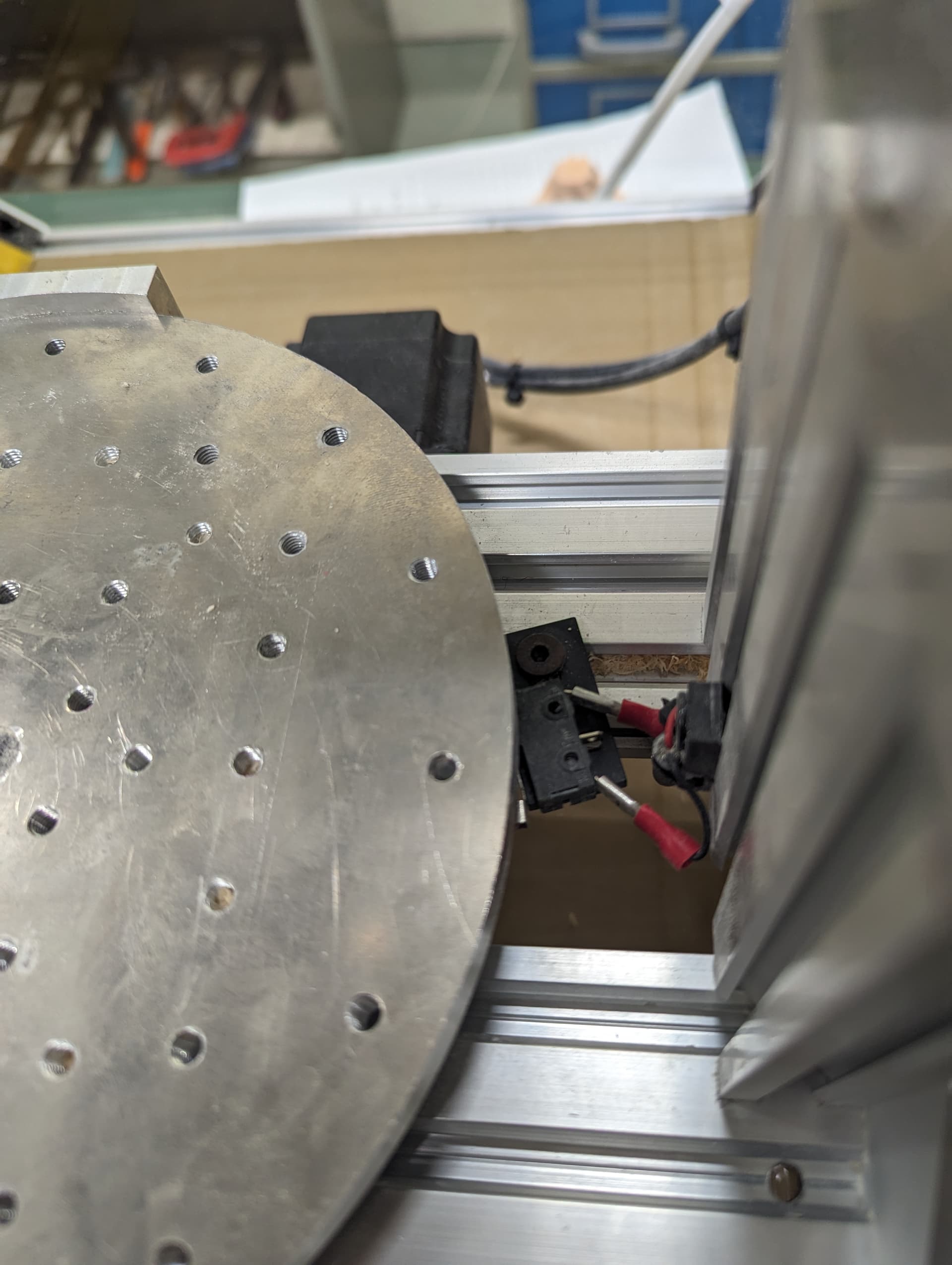
・A軸リミットスイッチ
・C軸リミットスイッチ
リミットスイッチの位置調整をミスるとリミットスイッチが折れ曲がってしまったり,逆に反応しなかったりするので,スペーサーではなく何らかの治具を作った方が良いかもです.
・sysフォルダ内のbed.gからの引用
G90G53G0Z0
G53G0A0C0
G30P0X-115Y-36Z-9999
G30P1X-115Y-186Z-9999
M673A
G10L20P1A0
機械座標(G53)ばかり使っているのはワーク座標を任意の値に書き換えてもきちんと動作させるためです.G30Zプローブ終了後にM673Aで勝手に回転テーブルが動いて補正されます.M673単体では位置が補正されるのみで原点の上書きはされないので補正後の位置で設定してやる必要があります.
これらの仕組みを考えるにあたってDuet3DのYoutubeチャンネルがアップしている動画を参考にしましたので併せて添付しておきます.
以上あくまでも一例として参考にしていただければ幸いです。
「いいね!」 2
Gym
7
こんにちは、アドバイスありがとうございます!
ブラックフライデーで買った怪しい部品がまだ届いていないので実際に5軸を設計して動かすのはもう少し先ですが、動いている先行事例があるのは力強いです。
M637はG30やbed.gとセットで理解しないといけなさそうですね。
ドキュメントだけだとまだ具体的な動き(実行時にマシンがどっちに動いてどこをプローブするのか)がイメージ/理解できていませんが、参考にしながら試してみようと思います。
リミットスイッチは私も付属の黒と赤のマイクロスイッチを使っていますが、若干苦しくなってきた感があります。変な方向から当たって折れる気がするので簡単に基準位置を取る方法がないかも考えてみます。
HRMK
8
M673やG30はwebcontrolerで手打ちしてもきちんと動作したのでbed.gに限らず一連の動きをオリジナルのGコードとしてsysフォルダ内に設定するのもありかもです。
動きは基本的に右手系に従うようですがM673に指定できる補正係数がうまく動作しないっぽいので補正方向が逆になる可能性あります。(=座標系の正負の方向を考慮する必要あり)
分かりやすい動画が手元になかったので先に添付したGコードとは少し違う動きですがA軸のキャリブレーションの動画がこんな感じになります。
「いいね!」 2


 Homing and autocalibration routine")