オープンソース全然関係ないですが
ステッピングモーターの実際のトルクがどのくらいなのか、マイクロステップでトルクがどれほど落ちるのかなどを計測してみました。

左から
Nema17(通販で買ったもの)
Nema23(AvalonTechストアのもの)
Nema23ハイトルク1(AvalonTechストアのもの)
Nema23ハイトルク2(詳細不明
Nema36(詳細不明
右の詳細不明二つは展示会の帰りにAvalonTech株式会社様から試供いただいたスペック謎のステッピングモーターです。
同じサイズのものを探して電流値とトルクを調べると下表のような値でした。
| Nema | 定格 | 最大トルク |
|---|---|---|
| 17 | 1.7A | 0.56N*m |
| 23 | 2.8A | 1.26N*m |
| 23ハイトルク1 | 3A | 2.45N*m |
| 23ハイトルク2 | 3A | 2.98N*m |
| 36 | 6A | 8.5N*m |
■計測方法
ステッピングモーターの先端にカップリングとデジタルトルクゲージを取り付け、手でホールドしてモーターを回転させたりトルクゲージを回してガッっと脱調したときの最大トルクを測りました
トルクゲージの誤差が±3%
手で測ったからか毎回10%くらい値がぶれますが、何度か計測してだいたい平均の値を載せています。
Duet3MB6HCで電流値やマイクロステップを変えながら計測しています。
■マイクロステップでトルクがどの程度落ちるのか
マイクロステップなしとx8でデータを取っていたのですが、値が変わらなかったので先にマイクロステップごとのトルクを計測しました。
nema23ハイトルクモーター2800mA マイクロステッx1~x32
保持トルクとリード8mm送りねじでF500状態でのトルクを計測
F500が維持されるようにマイクロステップとstep/mmを変更(マイクロステップ8→16ならstep/mmも200→400に変更)
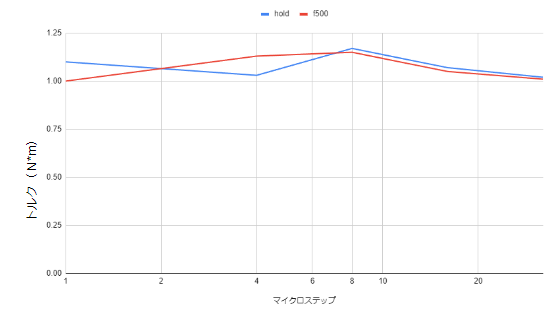
うーん計測誤差以上の違いが見えませんね。
体感でもマイクロステップなしとx32で全く違いがわかりませんでした。
マイクロステップでトルクが落ちる、というのはたいして気にする必要がなさそうです。
■各電流値でのトルク
上記の実験でマイクロステップでのトルク変化なしだったので、マイクロステップx8の値のみグラフにしています。
step/mm200
10Hz相当の低速回転時(=3rpm=F24相当) の値です。
カタログスペック
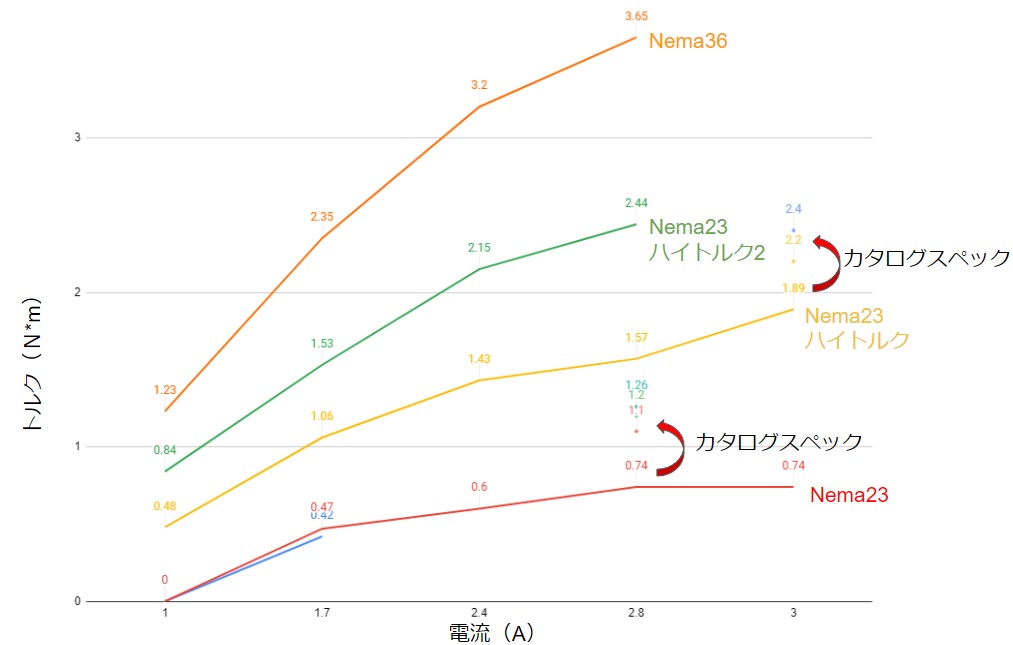
・サイズアップで順当にトルクが上昇、ただしnema17とnema23間は差が小さい
・カタログスペックはAvalontechストア、OPENBUILDSストア、オリエンタルモーターカタログの同形状の値を点で表示
・Nema36は最大5Aで6.39N.mまで確認(ケーブル発熱なし)
・保持トルクも測ったが、概ねこのグラフマイナス10%程度のトルク
・0はトルクゲージで測定不可(0.3N*m以下)です
全体的にカタログスペック上の最大トルクよりも低い値となっていますが
AvalonTechストアの商品ページにあるメーカー参照値とはぴったり合ってはいます。
計測の仕方や書かれていない条件の違いもあるでしょうが、実使用ではカタログの最大トルクはアテにできないですね。
パルス周波数ごとのトルク特性グラフが公開されている場合そちらを参考にした方がよさそうです。
■回転速度とトルクの相関
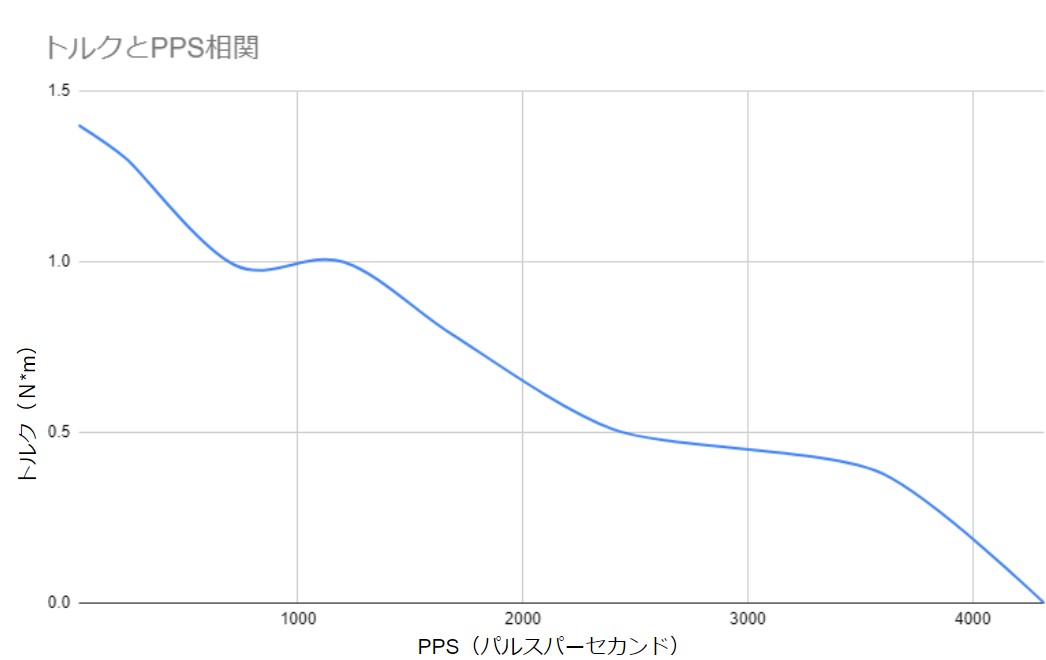
Nema23ハイトルク1でのトルク特性
メーカー参照値ではめっちゃ遅い回転の値しか載っていないので、実使用で使う高速回転帯まで測ったものになります。
1000PPS=F416
2000PPS=F832
3000PPS=F1250 程度に相当します。
CNCで早送り1800mm/minにしていますが、そのときにはもう0.3N・m以下なのでNema17の最大トルクよりも低くなっていますね。
今まで強気の送り速度設定でも脱調はしませんでしたが、こうしてみると恐ろしく低いトルクで加工していたんだなと戦々恐々です。