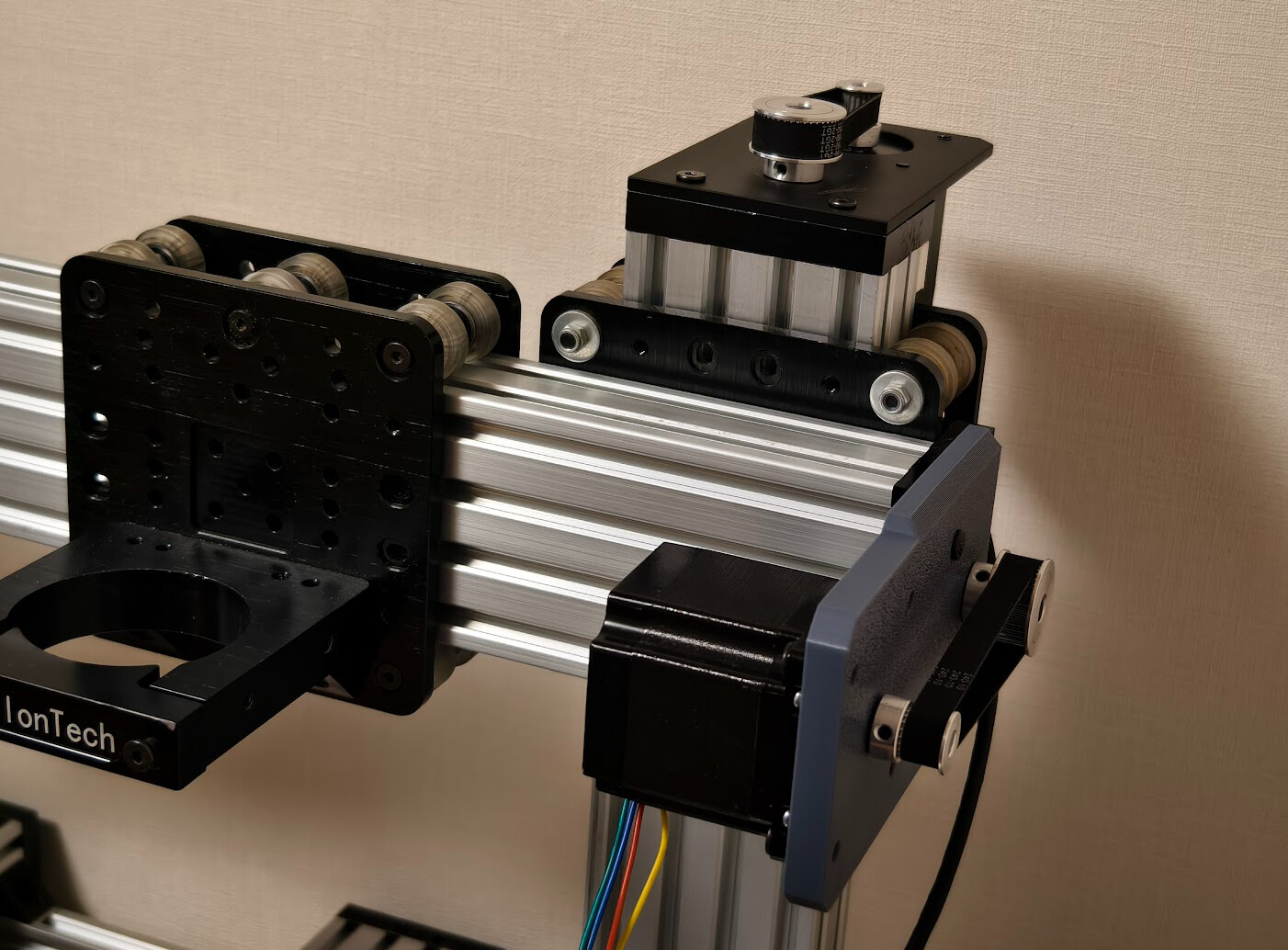
エンクロージャを作りたいのと思ったときにモーターが邪魔でした。
マシン内側にモーターを織り込んで省スペース化するためにタイミングベルト化してみました。
3Dプリントプレートを使っているので加減速の時に揺れていますが、動作自体はしています。
ついでに減速できるのもお得感があります。
衝突検知で機械原点を取得するセンサーレスホーミングをしているのですが、タイミングベルトで1/2に減速しているにも関わらず設定そのままでホーミングもできました。
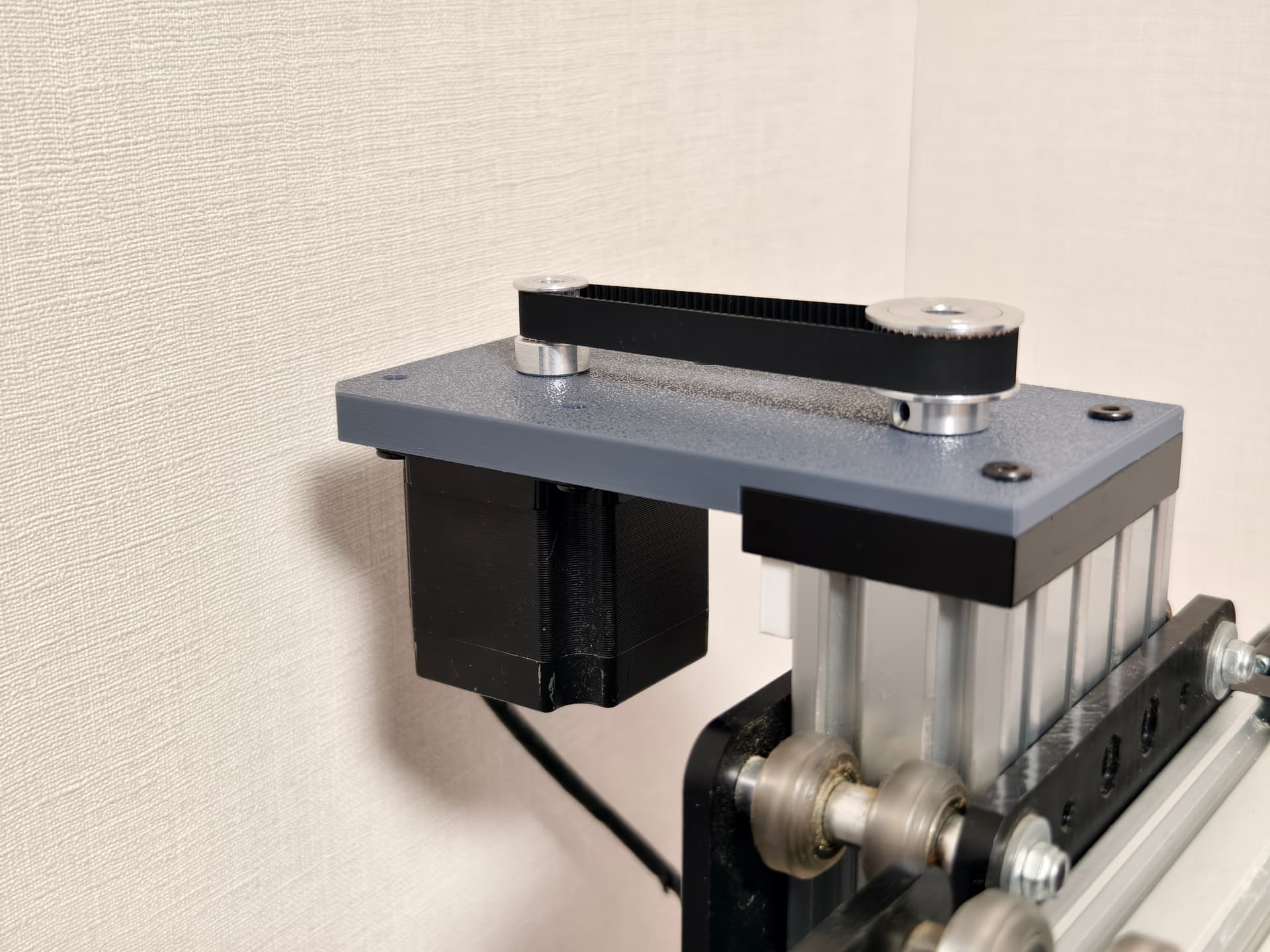
エンクロージャを作りたいのと思ったときにモーターが邪魔でした。
マシン内側にモーターを織り込んで省スペース化するためにタイミングベルト化してみました。
3Dプリントプレートを使っているので加減速の時に揺れていますが、動作自体はしています。
ついでに減速できるのもお得感があります。
衝突検知で機械原点を取得するセンサーレスホーミングをしているのですが、タイミングベルトで1/2に減速しているにも関わらず設定そのままでホーミングもできました。
ダイヤルゲージでバックラッシュなどを見ていたところ、プラスとマイナスの切り替えしで最大0.1mm程度のバックラッシュ的な挙動がありました。チャピーと相談しながら調整していると、タイミングベルトの弾性戻りが原因のようです。(面倒なのでここではバックラッシュとして扱います)
https://www.mdpi.com/2218-6581/7/4/75?utm_source=chatgpt.com
使用しているタイミングベルトのベルト長:240mm
伸び率:0.005~0.02%、中間をとって0.01と仮定して
240mmx0.01%→0.024mm
実機ではx1.5~x2程度になるので最大0.05mm程度の弾性変形をしているイメージ
ここにナットブロックやリードスクリューのバックラッシュものっかってきて最大0.1mmのイメージ
挙動としてはバックラッシュに近いのでバックラッシュ補正でごまかせそうではあるのですが、
M425のSパラメーター(適用距離乗数)が最小で1なので細かい動きに対しては補正しきれない部分があります。
具体的にはバックラッシュ補正0.1mm 距離乗数1 の場合
0.1mm以上の動きには補正がのるけど0.01mmの動きには補正の一部しか乗らない、たぶん0.1mm動くまでに0.1の補正のかけるので0.01mm動くときは0.01の補正になる?ので
0.1mm単位で動くのならバックラッシュゼロになるがより細かく動く時の切り替えし時にバックラッシュがちょっとでちゃう感じです。
タイミングベルトを入れるのなら、このあたりのデメリットを許容できるかは大事そうですね。
私の用途では0.01mmまで求めていない(正確にそこまで測れない)ので一旦このままコンパクト化して使いやすくしていきます。