いやー、動きました、動きました ![]()
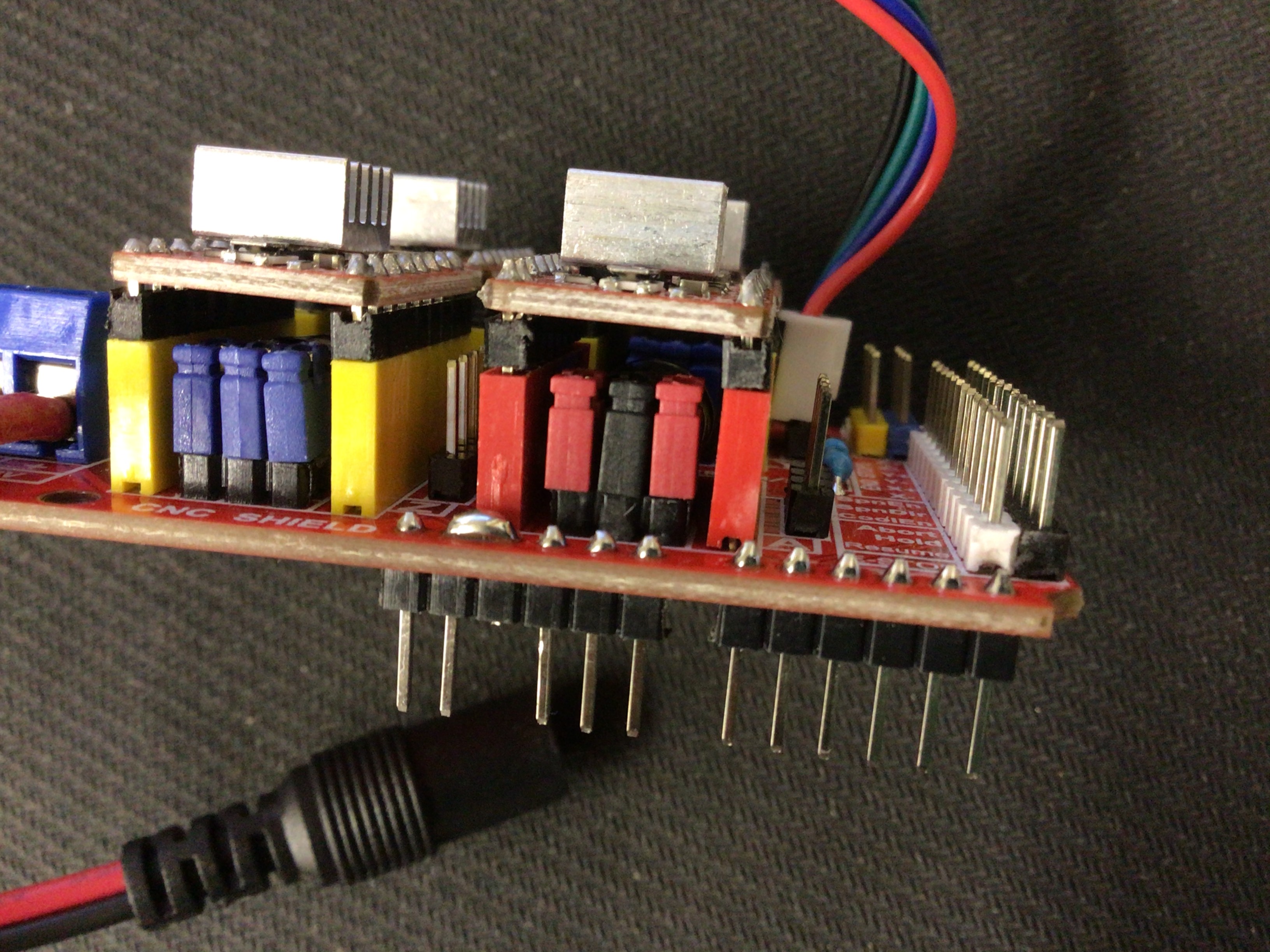
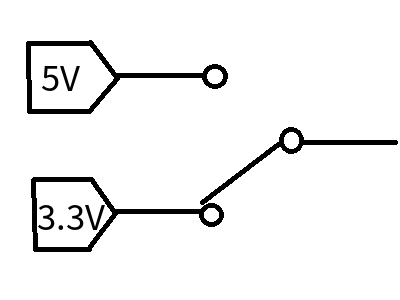
基板を改造して動かしてみたところ、案1( 5Vピンを切断、給電されなくした上で 3.3V をバイパス)でステッピングモーターを動かすことが出来ました。どうやらこの方向性で問題なさそうです。
https://github.com/staticboards/sb-cnc-shield
↑
KiCad を学習しながらの作業になるので少し時間はかかると思いますが、こちらの方の CNC Shield をベースに 5V と 3.3V の経路に切り換えスイッチを入れて、Arduino UNO と ESPDuino の双方に対応可能なシールド用 PCB パターンを作ります。
加えて、プラグの接続部を抜け防止がついている、日本圧着端子の「XHシリーズ」のようなコネクタに変更することで、振動や引っ張りに対してもいくらか強く出来ると思います。
コネクタが密集している部分については、リボンケーブル(フロッピーディスクドライブやPATAで使われていたようなモノ)と脱落防止付きフラットケーブルコネクタで外に伸ばして、端子台のようなものに付ければ取り回しがしやすくなるはず。
ノイズキャンセリング部も端子台側基板に付けることで、CNC Shield 側基板の改造は最小限で抑える予定です。現在リミットスイッチ関連のノイズ対策には「フェライトコア」、「コンデンサ」、「光ファイバによる信号伝達」、「逆位相のノイズによる相殺」の4方式を考えています。後に行くほど大掛かりなので、出来ればフェライトコアで解決出来て欲しい。
このアイデアを形に出来た暁には、プロトタイピングでの使用を主目的としつつ、そこまでヘヴィではない、危険を伴わない用途でも使用可能な「Grbl_ESP32 入門機」として提案出来れば良いな、と思っています。