位置制御巻取り機構「PCWM」v1
――プロジェクト名――
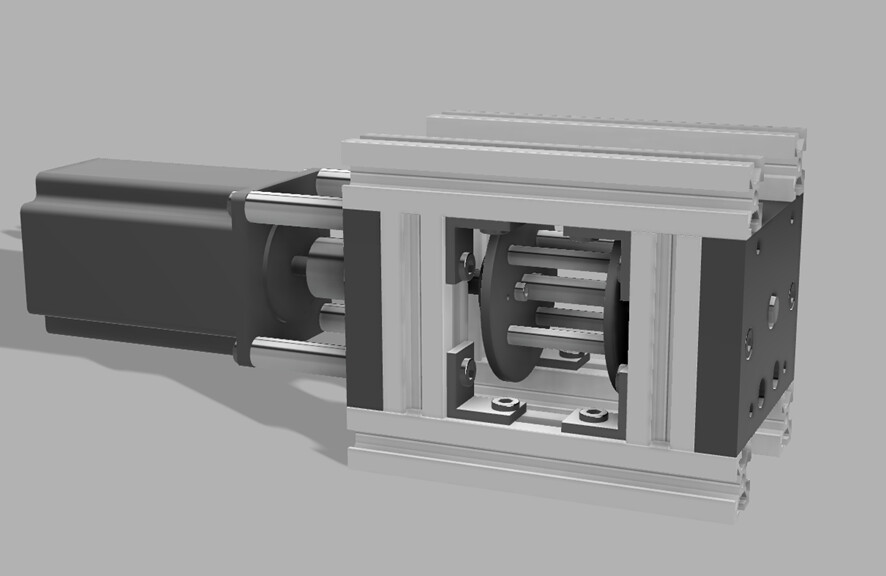
物理伝動機構キット 「PCWM」(Position Control Winding Mechanism)
――紹介――
物理機構を使った動く作品を作りたい人向けの物理伝動機構キットの1つとなるワイヤの巻取りを行う機構です。
・対象物の位置制御を目的とした巻取り
・汎用アルミフレームによる他の機構への組み合わせに対する高自由度
・加工が必要な部品を最小に抑えることによる低コスト化
を目指した設計となっています。
――基本仕様――
- 巻取り可能最大荷重:4kg (モータトルク1.6N.m、巻取り半径2cm、安全率2)
- 最大巻取り速度:0.28m/s (500PPS、基本ステップ角度1.8°)
- 最小巻取り量 (基本ステップ角度1.8°) : 約0.5mm (ワイヤ径による影響無視)
- 1回転での巻取り量 : 約11cm (ワイヤ径による影響無視)
――必ず読んでください――
安全に関する注意事項、免責
自作・改造は自己責任でお願いいたします。
自作・改造による直接・間接の被害について
alg及び部品の販売元は一切責任を負えません
――ドキュメント――
――開発者――
alg
――ライセンス――
![]()
この 作品 は クリエイティブ・コモンズ 表示 4.0 国際 ライセンスの下に提供されています。