メカキネを使って自動人形を作りたいと考えています。
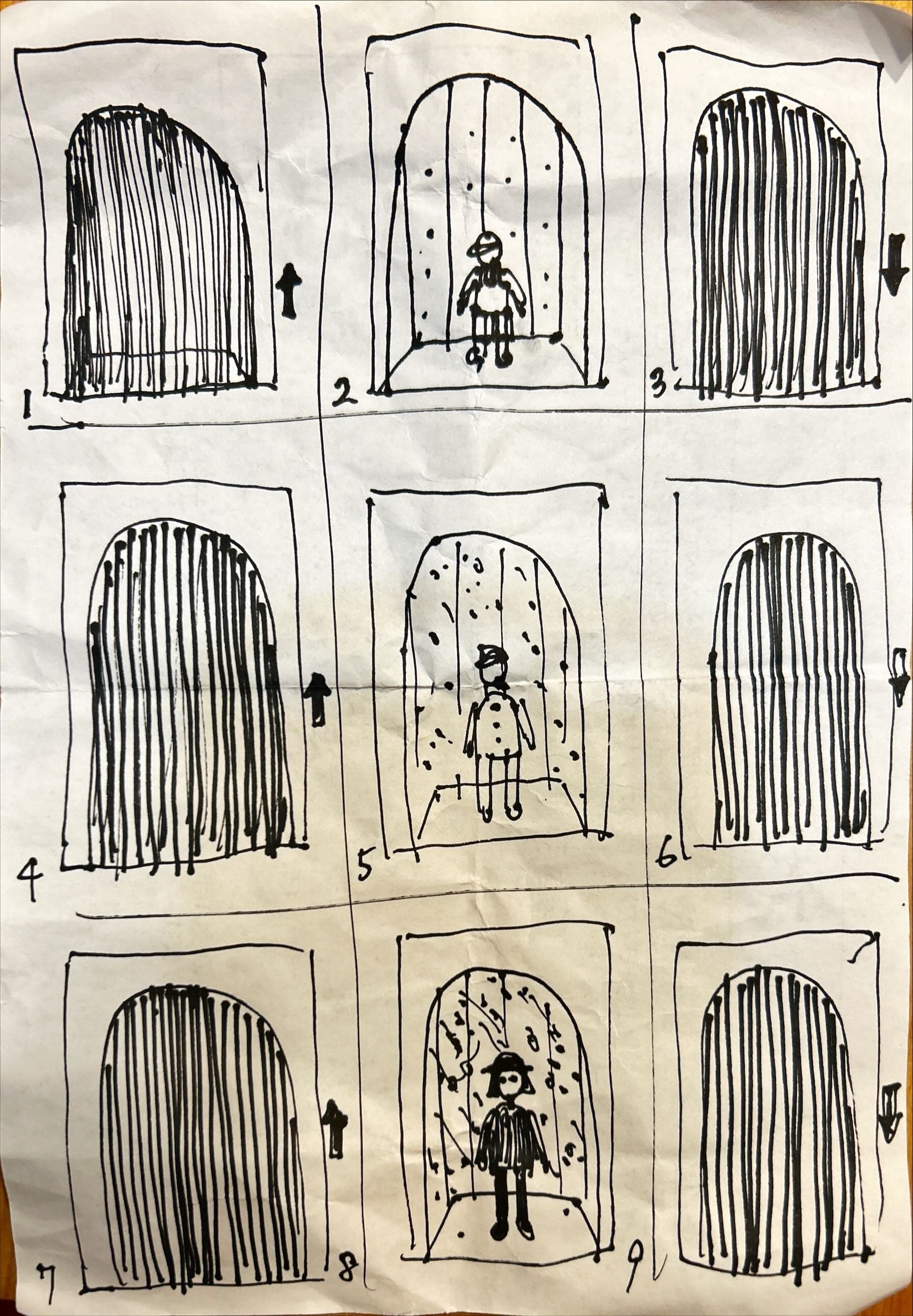
イメージしている動きは以下のようになります。
1 舞台のカーテンが上がる
4 舞台のカーテンが上がる
7 舞台のカーテンが上がる
さっそく質問があります。
ホーミングをする際、CNCのように軸を直線運動するときは
(例えば、軸が時計回りに回転するとして、
ちなみにArduinoを使って作品制作をしたとき、同様のケースでは透過型光電センサを使って
nyaru
2024 年 8 月 22 日午前 2:37
2
こんにちは。
回転物の原点検出方法は悩みますよね・・・。
スイッチの検出はホーミング時のスイッチを検出しながら動く特殊な移動の時のみ検出されます。
同じようにフォトインタラプタ(透過型光電センサ)を使ってもよいと思います。
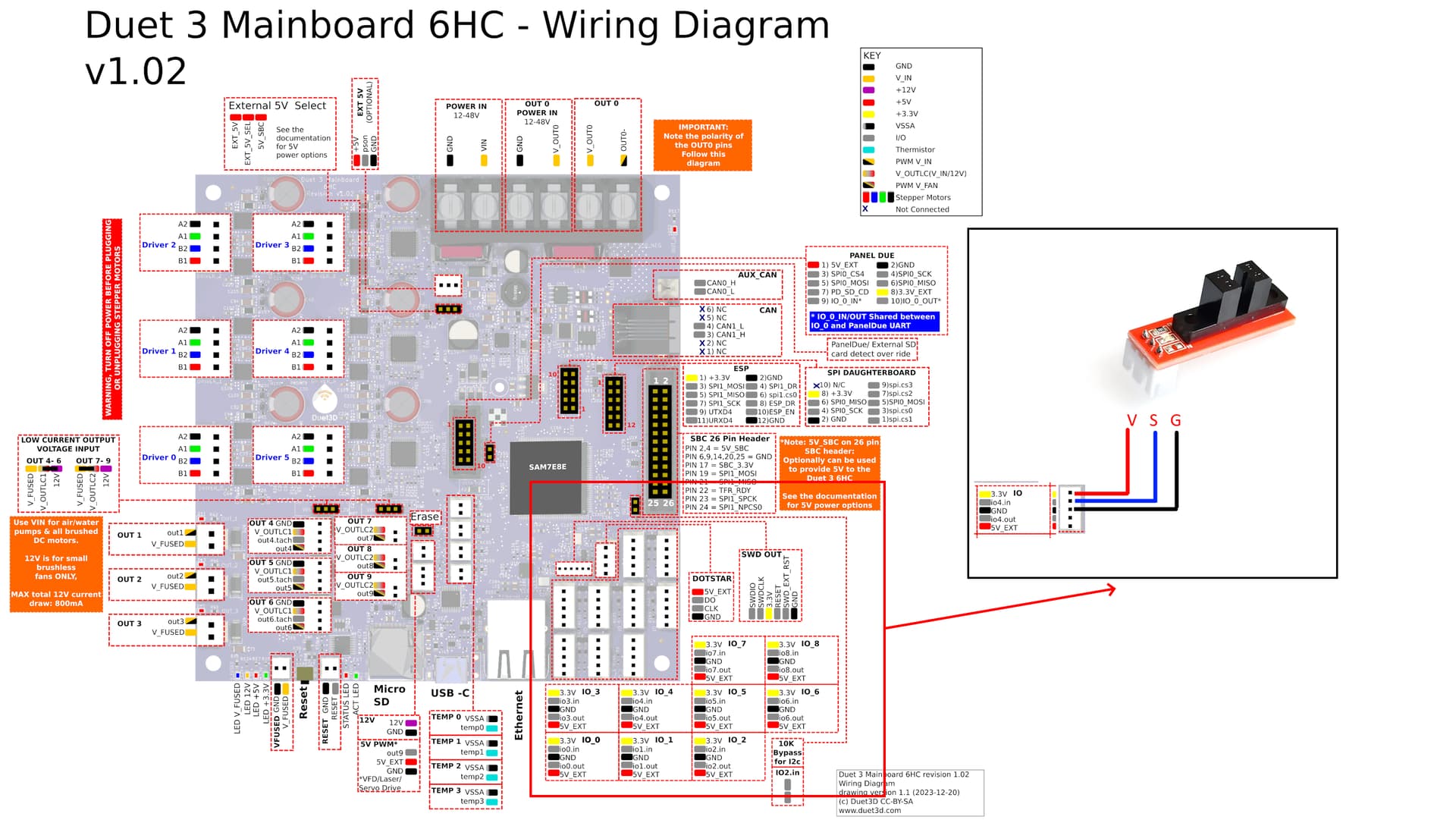
一応、フォトインタラプタ(透過型光電センサ)を使う場合の配線例をあげておきます。
画像のような3Dプリンター向けの光学式リミットスイッチモジュール(フォトインタラプタ)を使ったことがあるのですが、その時は上記のような配線で特に問題なく機能していました。
「いいね!」 1
↑まさに知りたかったことでした。
光学式リミットスイッチモジュールをDUET3に配線したところ、
confin.gは以下のようになっています。
; Endstops
追記
「いいね!」 1
制作を再開しました!
「いいね!」 2
大まかに動くようになりました。これから細かい部分を詰めていきます。
ひとつ質問があります。
幕が閉じて、幕の向こうで人形の台が逆回転しているときは
nyaru
2025 年 1 月 4 日午後 4:31
7
こんにちは。
可能だと思います。モーションのファイルの最初と最後にライトをオン・オフするGコードを差し込めば実現可能のように思います。
config.gを編集して出力ピンの定義をする
再生するNCファイルの先頭と最後に出力ピンのONOFFのGコードの追記
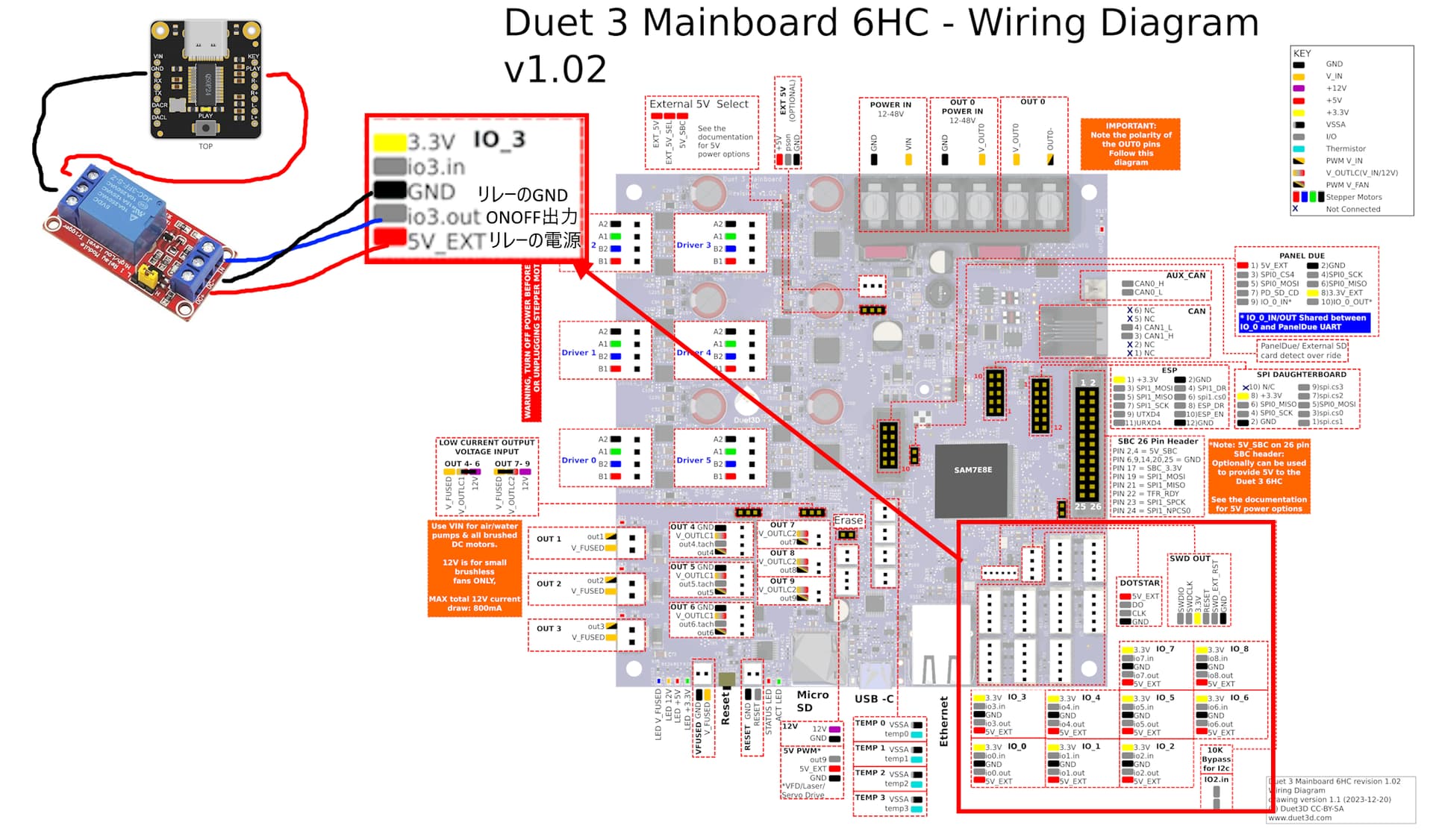
ライト関連の配線
ざっくり説明します。
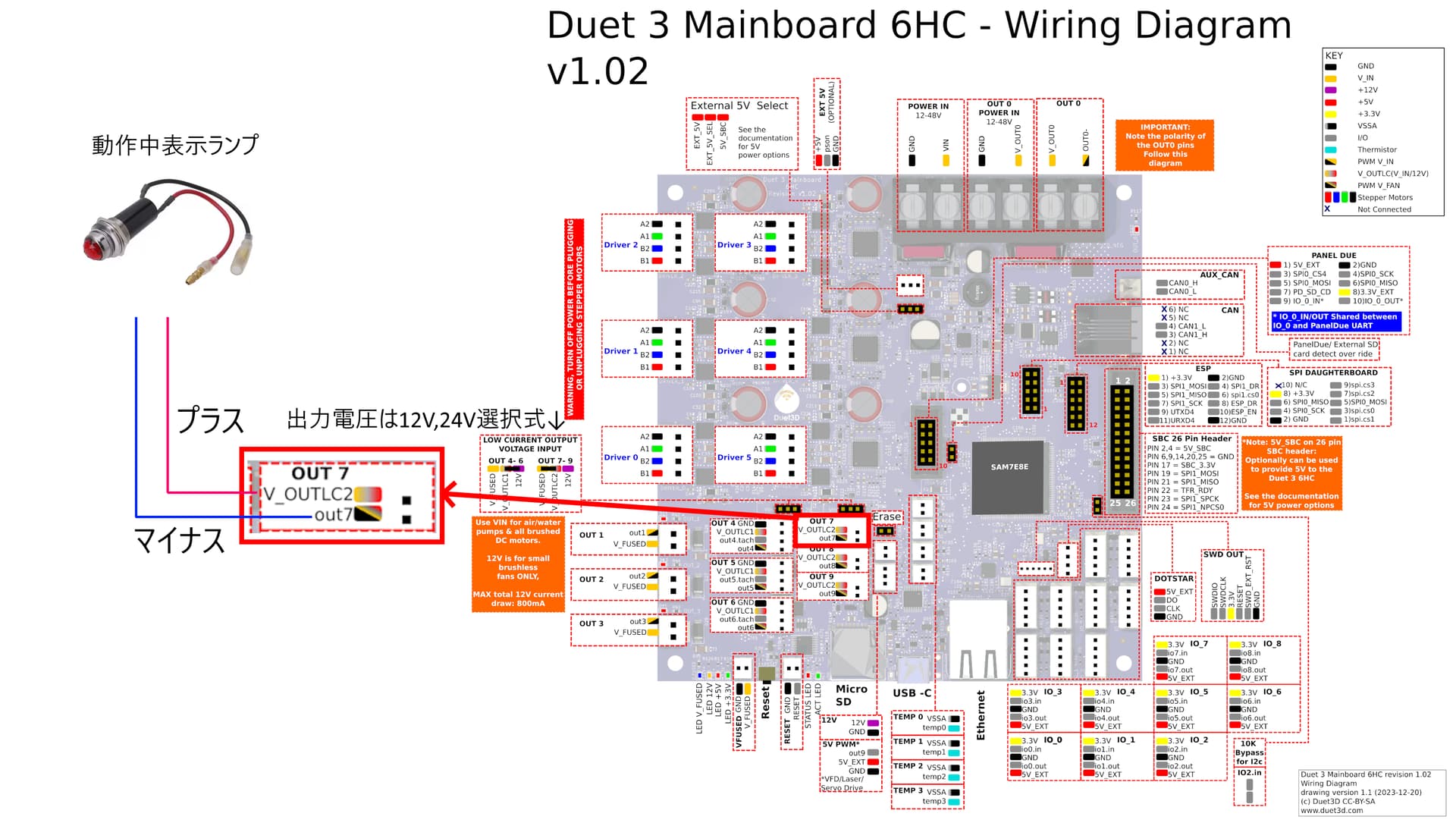
DuetのOUT7~9のピンがプラスマイナスの2ピンしかなくて非常にわかりやすいと思います。ただし、自分で圧着してコネクタ作りが必要です。
コネクタづくりが難しそうであれば空いているIO0~8のGNDとio◯.outを使うことにすれば、リミットスイッチのケーブルのコネクタの金具部分を入れ替えて配列を変えることで使えるので、多少楽です。
使う予定のランプに合わせて出力ピンを選んでください。
Duetのconfig.gに以下を追記します。
;出力ピン定義
M950 P0 C"out7" ;出力ピンP0作成
M42 P0 S0.0 ;出力ピンP0 デフォルトはオフ
実際に配線してみて、WEBUIにて以下のGコードを送信してみてM42 P0 S1.0 でランプがオンM42 P0 S0.0 でランプがオフ
WEBUIでジョブメニューのところにあるtrigger◯.gのファイルを編集で開いて先頭と最後に上記の動作確認で使ったGコードを差し込みます。
先頭 M42 P0 S1.0M42 P0 S0.0
これでおそらくボタンが押されたら最初にランプが点灯し、最後にランプが消灯するように動作するかと思います。
たぶんこれでいけると思うのですが、一度ご確認ください
「いいね!」 1
おお!出来るんですねー!
中原中也記念館(山口県山口市)にて
「いいね!」 1
質問があります。
ボタンを押して、ステッピングモーターが動いている間、
nyaru
2025 年 2 月 15 日午後 1:44
11
こんにちは。
おそらく可能だとは思いますが、工夫しないといけないかと思います。
以下はすべて推測ですが
DFPlayerのwikiのページ をちらっとみた限りだと
前述のように出力ピンをON/OFFすることはDuet3では可能なので、
こんにちは。
素晴らしい作品ですね!
可能だと思います。モーションのファイルの最初と最後にライトをオン・オフするGコードを差し込めば実現可能のように思います。
ただし少し変更が必要になります。
config.gを編集して出力ピンの定義をする
再生するNCファイルの先頭と最後に出力ピンのONOFFのGコードの追記
ライト関連の配線
ざっくり説明します。
どんなライトを使うつもりかによ…
configにて空いているioピンを出力ピンとして定義
;出力ピン定義
M950 P1 C"io◯.out" ;出力ピンP1作成
M42 P1 S0.0 ;出力ピンP1 デフォルトはオフ
オン→少し待つ→オフでスイッチ動作を再現
M42 P1 S1.0 ;出力ピンP1をオン
G4 P500 ;500ms待つ
M42 P1 S0.0 ;出力ピンP1をオフ
上記のようなことをすれば可能かなとは思うのですが、実際はどうなるかわからないです。
「いいね!」 1
お返事ありがとうございます!
Chat GPTに聞いてみました。(未検証です。)
Duet 3でDFPlayer Miniを使用して音楽を再生する方法を説明します。
必要なもの
Duet 3(Mini 5+、6HC など) DFPlayer Mini MicroSDカード(FAT32フォーマット) スピーカー ジャンパーワイヤー 5V電源(DFPlayer Mini用)
1. ハードウェア接続 Duet 3とDFPlayer Miniを以下のように接続します。
DFPlayer Mini
Duet 3
VCC (5V)5V
GND GND
RX Duet 3のTXピン (GPIO/UART)
TX Duet 3のRXピン (GPIO/UART)
SPK1 , SPK2 スピーカー
注意: DFPlayer MiniのRXは3.3Vトレラントではない ため、Duet 3 (3.3V) と接続する際は1KΩ + 2KΩの分圧回路 を使って電圧を調整してください。
2. MicroSDカードの準備
MicroSDカードをFAT32フォーマット にする(32GB以下推奨)。“mp3” フォルダを作成 し、その中に “0001.mp3”, “0002.mp3” などの形式でMP3ファイルを保存する。
3. Duet 3の設定(RepRapFirmwareのGコード) DFPlayer MiniはUART(シリアル通信)で制御するため、Duet 3のシリアルポートを有効にします。
M575でシリアルポートを設定 M575 P1 S2 B9600 ; UART1 (通常は IO_1) を9600bpsで設定
P1: UART1 (Duet 3のIO_1ポート)S2: 通信モード(DFPlayer Mini向け)B9600: 通信速度(DFPlayer Miniのデフォルト)
DFPlayer Miniにコマンドを送る Duet 3のM118(シリアル通信送信コマンド)を使用してMP3を再生します。
音楽を再生 M118 P1 S"T001" ; 0001.mp3を再生
音量調整 M118 P1 S"VOL15" ; 音量を15に設定(0-30)
再生停止 M118 P1 S"STOP"
4. その他の方法(拡張ボードを使用)
I/Oピンを使う方法: 外部マイコン(Arduinoなど)を使用:
まとめ Duet 3のUARTを使ってDFPlayer Miniにコマンドを送ることで、Gコード経由でMP3を再生できます。設定はM575でUARTを有効化し、M118でシリアルコマンドを送信します。
もし具体的な設定やトラブルがあれば教えてください!
nyaru
2025 年 2 月 17 日午前 8:52
15
Duet3でシリアル通信を使ってデバイスを制御する発想がなかったです。
ちなみにChatGPTあるあるで、ちょいちょい内容的には間違っているので少し訂正しておくと
シリアルポートの設定ではM575 P◯ S2 B9600
なのでDuetのRX:受信、TX:送信ピンはそれぞれIO0かIO1のio.inとio.outに該当します。
automatamaker:
DFPlayer Miniにコマンドを送る Duet 3のM118(シリアル通信送信コマンド)を使用してMP3を再生します。
音楽を再生 M118 P1 S"T001" ; 0001.mp3を再生
音量調整 M118 P1 S"VOL15" ; 音量を15に設定(0-30)
再生停止 M118 P1 S"STOP"
M118 P◯ S"メッセージ"
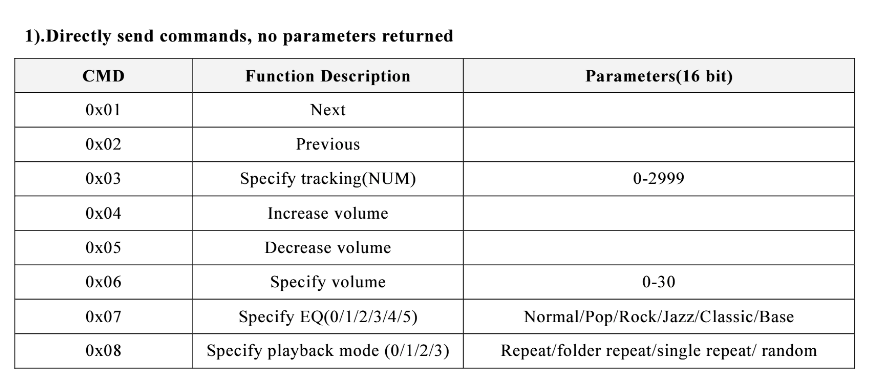
一番の問題がメッセージの部分が結構厄介で、DFPlayerの種類によるかと思いますがコマンドが全然違いそうです。
from:
MP3-Player-DFPlayer/DFPlayer Mini Manual.pdf at master · RalphBacon/MP3-Player-DFPlayer · GitHub
少なくとも"STOP"とかではなく、0x01とかの値をコマンドとして送らないといけない気がします。
なので、試してみても全然いいとは思うのですが、試す手軽さでいうならリレーを使う方が手軽かなぁと思います。
「いいね!」 1